
Emulation des EV-PMSM-Antriebsstrangs mit Motoremulator und Inverter-Test
Dieses Beispiel zeigt, wie eine PMSM-basierte Emulation in Kombination mit feldorientierter Regelung das reale Verhalten eines EV-Antriebsstrangs für Test- und Validierungszwecke nachbilden kann. Hier implementieren wir ein feldorientiertes Regelungssystem zur Regelung von Drehzahl und Drehmoment des Motors.
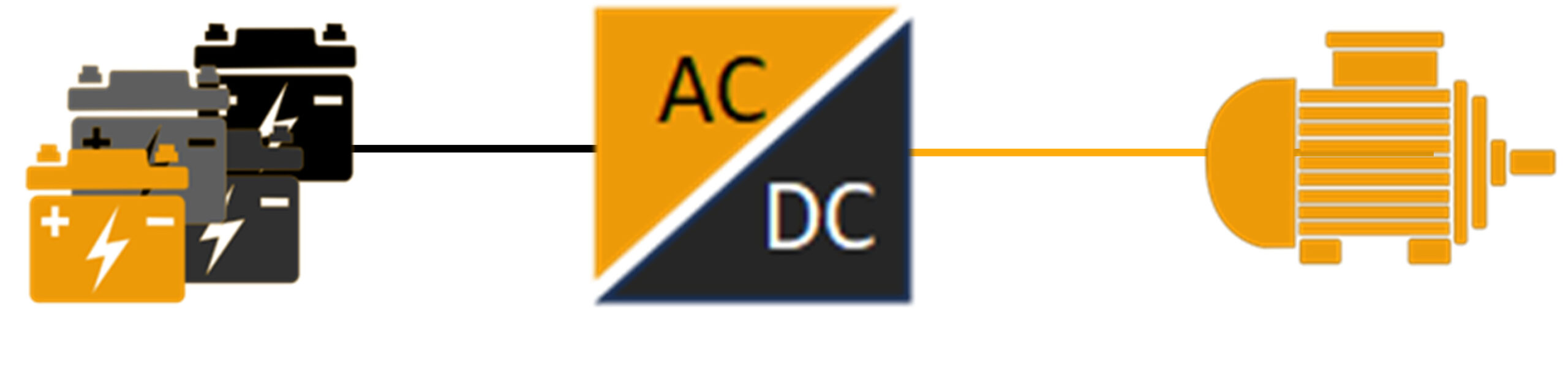
Fig 1. EV Powertrain
Abb. 1 zeigt die Antriebsstrang-Konfiguration, bei der eine Hochvoltbatterie über einen Inverter mit dem Motor verbunden ist. Der Inverter stellt die für den Motorbetrieb erforderliche Spannung direkt aus der Batterie bereit.
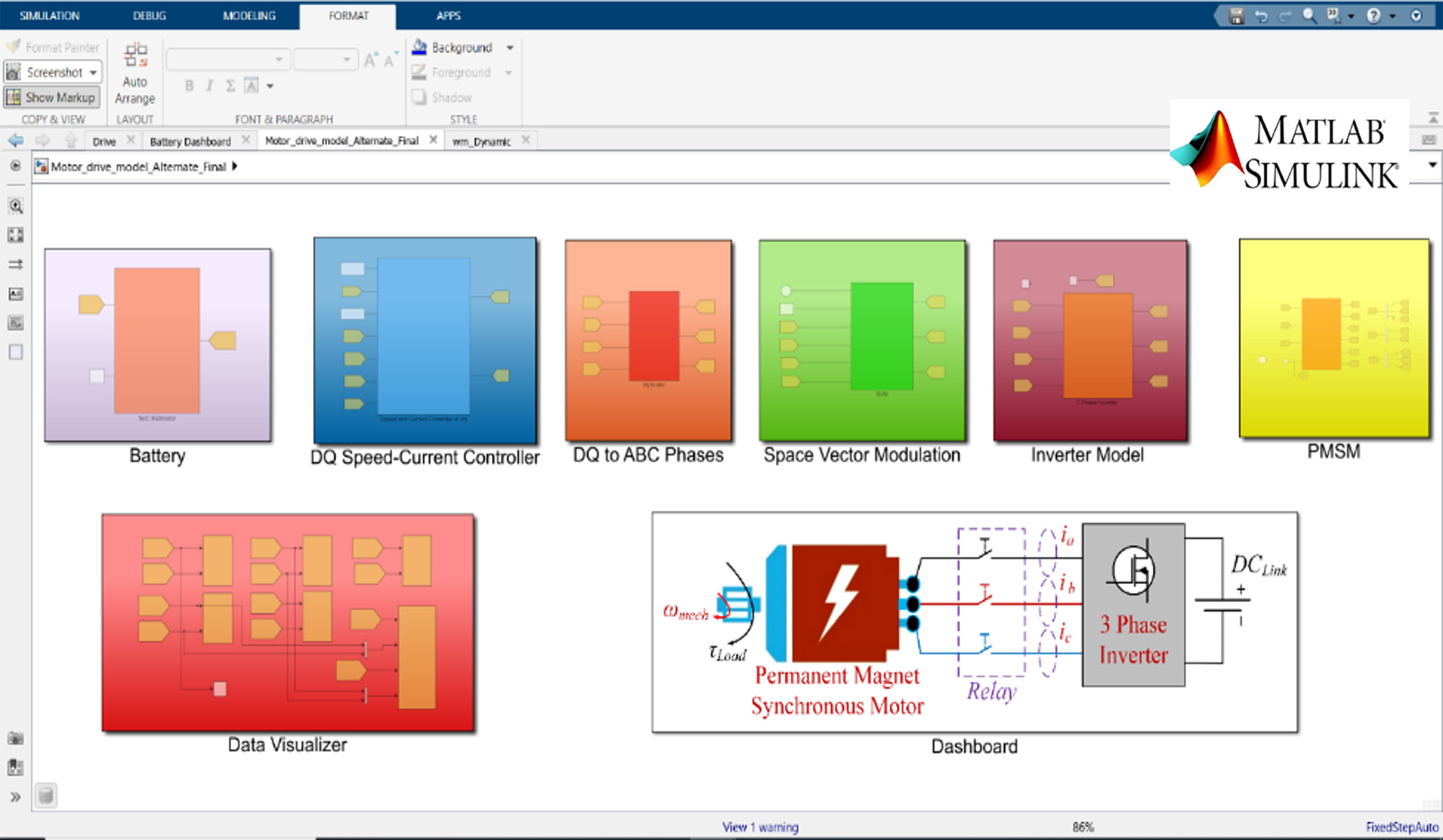
Fig 2. Simulink Implementation of EV Powertrain
Betrachten wir nun, wie die einzelnen Module in Simulink modelliert werden.
Implementierung des EV-Modells
Modellierung des Batteriepakets
Das Simulink-Modell der Batterie für das EV ist in der folgenden Abbildung dargestellt. Das Modell nutzt den Batteriestrom zur Schätzung des Ladezustands (State of Charge, SoC) und berechnet die Leerlaufspannung dynamisch als Funktion des SoC. Dieser Coulomb-Counting-Ansatz ist für seine Einfachheit bekannt und basiert hauptsächlich auf der Entladung des Batteriepacks.
$$I_{Battery} = frac{P_O}{V_{DC.Battery}}$$
$$SoC(t) = SoC_0 - int I_{Battery}(t) , dt$$
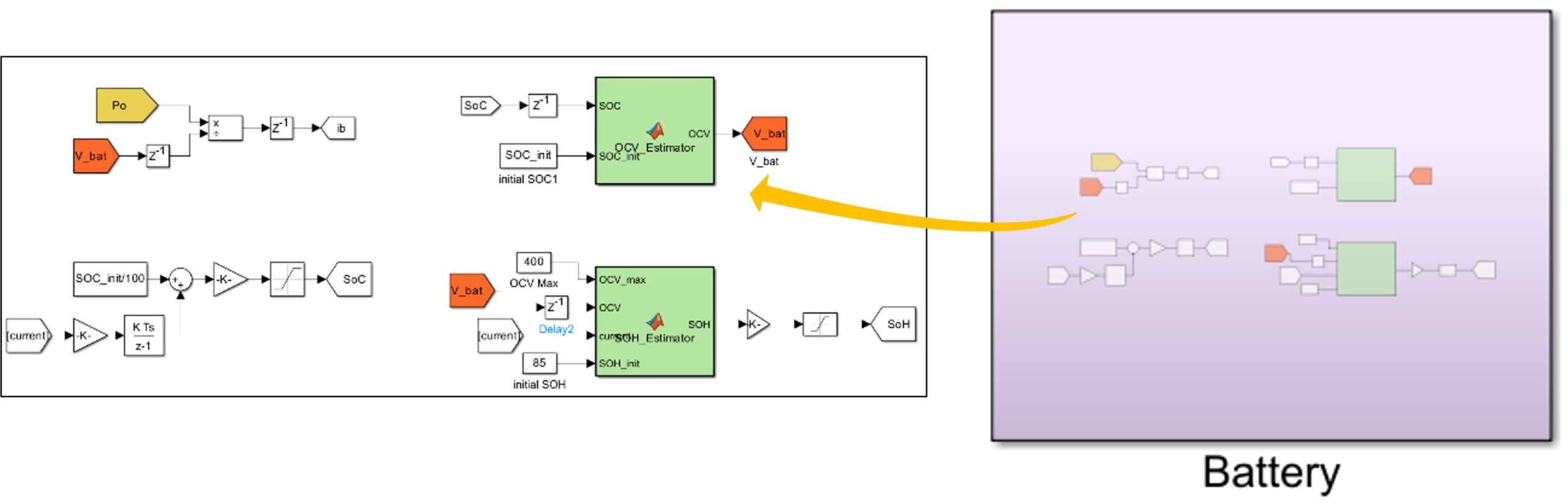
Fig 3. Simulink Battery Model
Modellierung des Antriebs:
$$
\left[
\begin{array}{c}
\frac{d \tilde{l}_d}{d t} \\
\frac{d \tilde{l}_q}{d t} \\
\frac{d \widetilde{\omega}}{d t}
\end{array}
\right]
=
\left[
\begin{array}{ccc}
-\frac{R_s}{L_d} & \frac{L_q p}{L_d} W & \frac{L_q p}{L_d} I_q \\
-\frac{L_d p}{L_q} W & -\frac{R_s}{L_q} & -\frac{L_d p}{L_q} I_d - \frac{p \psi_f}{L_q} \\
\frac{3 p}{2 J} \left( L_d - L_q \right) I_q & \frac{3 p}{2 J} \left( \psi_f + \left( L_d - L_q \right) I_d \right) & -\frac{B}{J}
\end{array}
\right]
\left[
\begin{array}{c}
\tilde{l}_d \\
\tilde{l}_q \\
\widetilde{\omega}
\end{array}
\right]
+
\left[
\begin{array}{ccc}
\frac{1}{L_d} & 0 & 0 \\
0 & \frac{1}{L_q} & 0 \\
0 & 0 & -\frac{1}{J}
\end{array}
\right]
\left[
\begin{array}{c}
\tilde{v}_d \\
\tilde{v}_q \\
\tilde{t}
\end{array}
\right]
\quad
\begin{array}{l}
k_i = \omega_s^2 \frac{2 J_m}{K_T P} \\
k_p = \omega_s 2 \zeta \frac{2 J_m}{K_T P}
\end{array}
$$
Dieses linearisierte Modell stellt eine permanenterregte Synchronmaschine dar, die zur Simulation des Motorantriebs in Simulink verwendet wird. Die Matrizen beschreiben die Änderungsraten der Ströme (i_d und i_q) sowie der Motordrehzahl. Zusätzlich wird ein feldorientiertes Regelungsschema (FOC) eingesetzt, dessen Struktur in Abb. 4 dargestellt ist.
Die Regelparameter für unsere Simulation wurden mithilfe der unterhalb der Abbildung angegebenen Gleichungen bestimmt. Dabei sind Ld und Lq die d- bzw. q-Achsen-Induktivitäten. Ebenso bezeichnet P die Anzahl der Polpaare und λ𝑝𝑚 den Permanentmagnetfluss der Maschine.
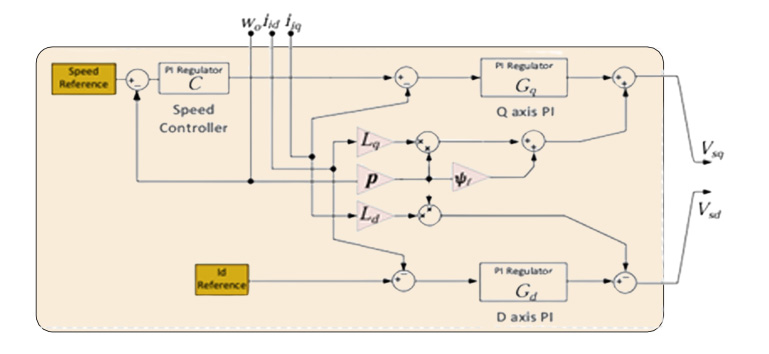
Fig 4. Field-Oriented Control of PMSM
Das Simulink-Modell des Antriebs besteht aus vier Untermoduleinheiten: DQ-Drehzahl-/Stromregler DQ-zu-ABC-Phasentransformation Raumzeigermodulations-Funktionsmodell Schalt-Inverter-Modell Das Modell des Drehzahl-/Stromreglers ist in Abb. 5 dargestellt, wobei die Gleichung für das erzeugte elektromagnetische Drehmoment der PMSM vereinfacht wurde, sodass nur der q-Achsen-Strom berücksichtigt wird
Ein weiteres Untermodul innerhalb des Antriebsmodells ist der DQ-zu-ABC-Transformator. Dieser erhält als Eingänge die Referenzspannungen Vd, Vq sowie den Rotorwinkel und transformiert die DQ-Größen in ABC-Phasen.
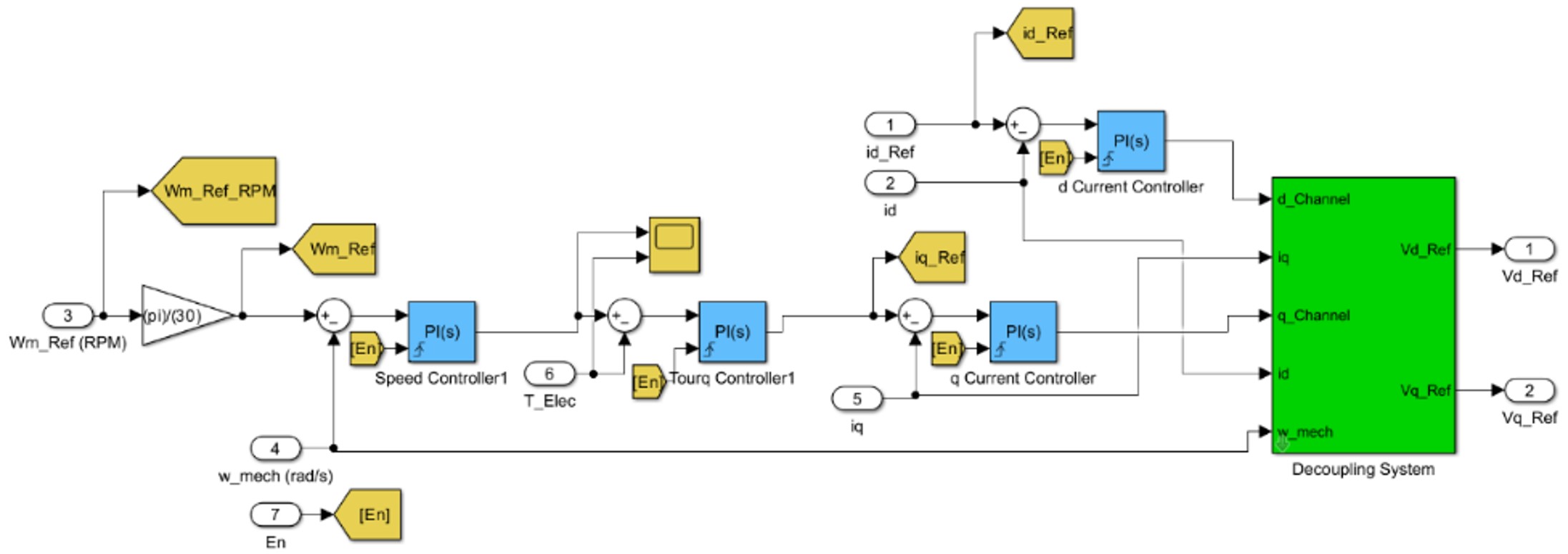
Fig 5. DQ Speed-Current Controller
Das entsprechende Simulink-Modell ist wie folgt aufgebaut:
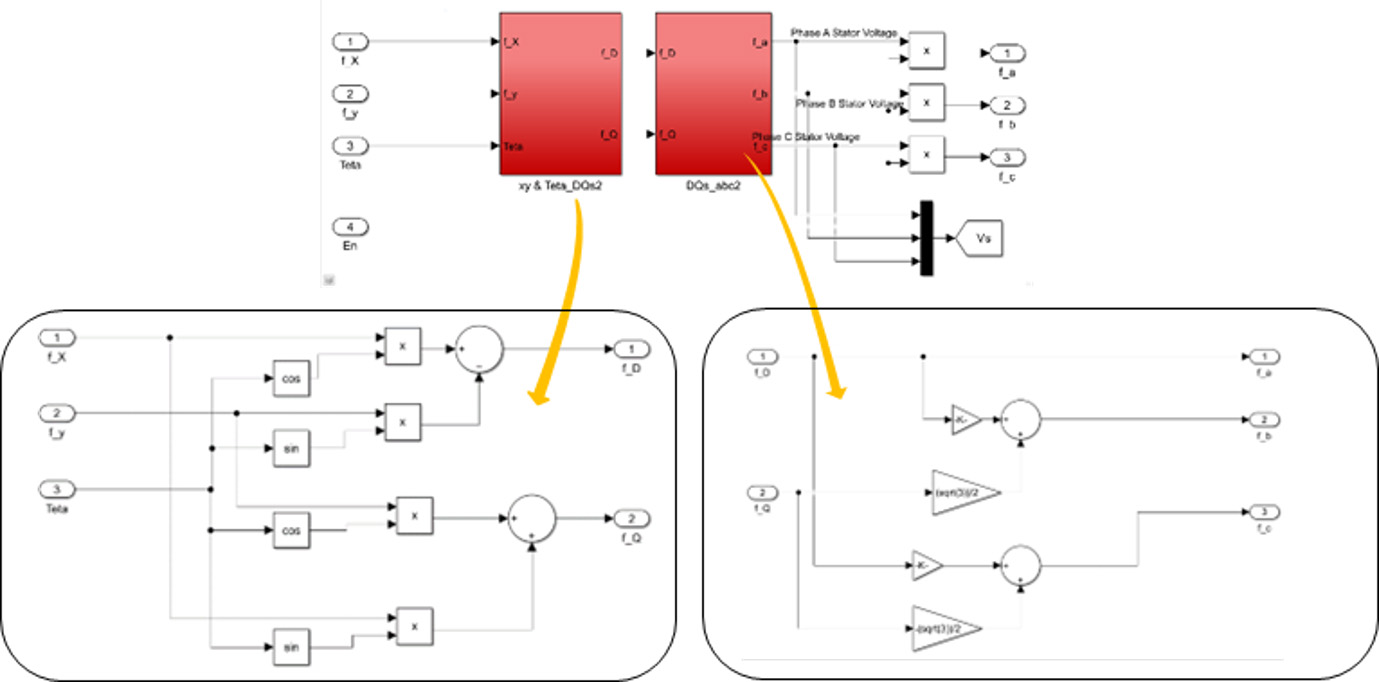
Fig 6. DQ-to-ABC Transformation Model
Die Raumzeigermodulation (SVM) ist eine weit verbreitete Technik zur Steuerung der Ausgangsspannung von Invertern. Wird sie bei permanentmagneterregten Synchronmaschinen (PMSM) für die feldorientierte Regelung (FOC) von Drehzahl und Strom angewendet, ermöglicht SVM eine effiziente und präzise Motorsteuerung. Dabei werden die Referenz-Spannungsvektoren innerhalb des Spannungs-Raumzeigerdiagramms moduliert, um die gewünschte Ausgangsspannungswelle zu erzeugen.
Dies stellt sicher, dass die Inverterausgangsspannung der Referenzspannung folgt, die für einen optimalen Motorbetrieb erforderlich ist.
Bei der SVM wird die Ausgangsspannung des Inverters als Kombination von sechs oder mehr Spannungsvektoren dargestellt, die in einem sechseckigen Muster im zweidimensionalen Spannungsraum angeordnet sind. Häufig wird dabei die Technik der Space Vector Pulse Width Modulation (SVPWM) verwendet, um die Schaltsignale für den Inverter zu erzeugen. SVPWM berechnet die Tastverhältnisse der Schaltgeräte, um den Raumvektor zu approximieren, indem die Pulsbreiten der Spannungsvektoren angepasst werden.
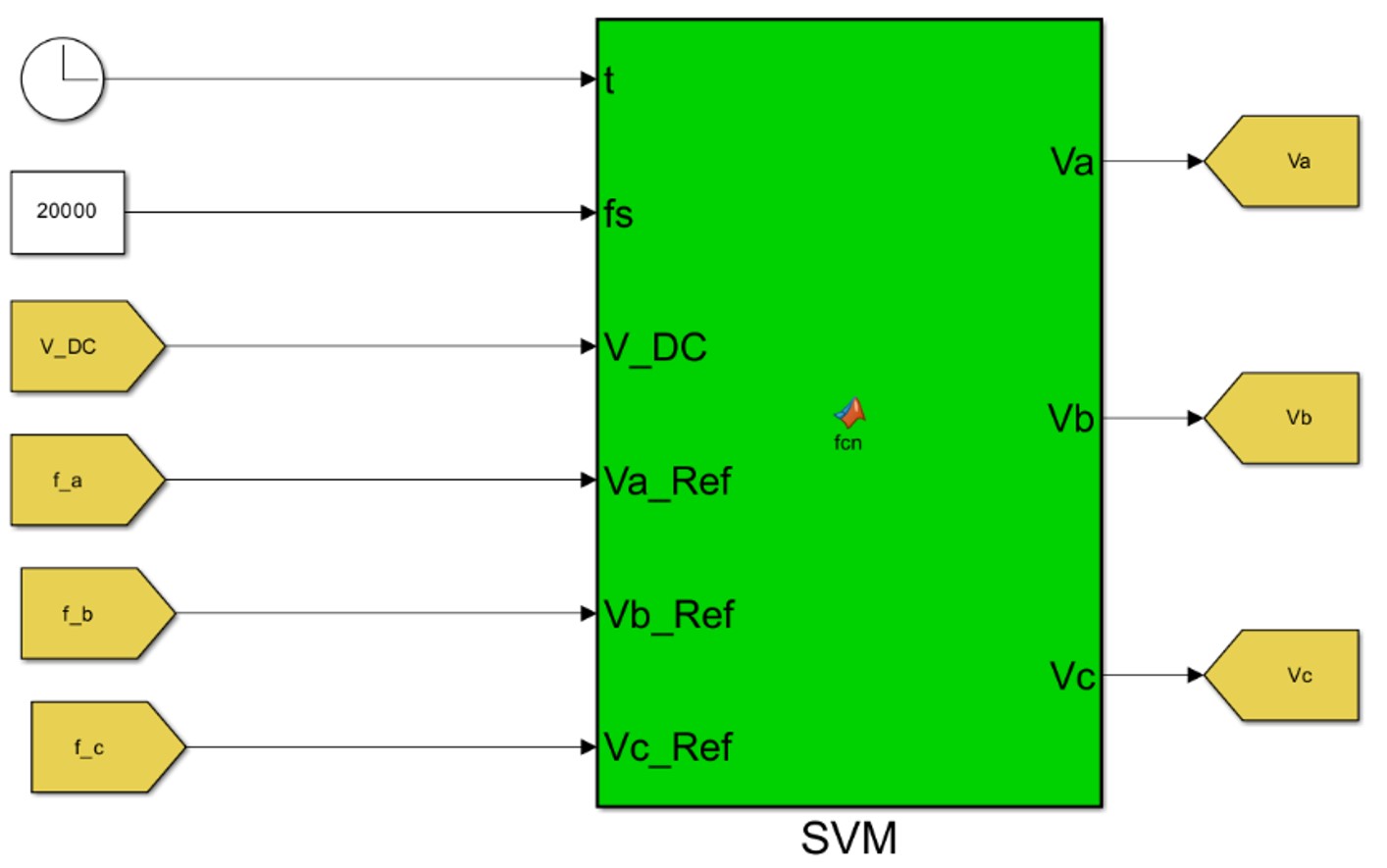
Fig 7. SVM Simulink Function Implementation
Das finale Untermodul beschreibt die Implementierung der SVPWM-Invertersteuerung für die feldorientierte Regelung (FOC) einer PMSM, die auf die Regelung von Drehzahl und Strom ausgelegt ist. Das erzeugte SVPWM liefert die optimalen Schaltsignale für den Inverter basierend auf der Position des Referenz-Raumvektors innerhalb der sechs Sektoren.
$$D_i = frac{1}{2} left( 1 + m frac{V_i}{V_{dc}} right)$$
Where, m is the modulation index, Vi is the magnitude of the voltage vector and Vdc is the DC bus voltage from the battery. Moreover, the equation 2/3 (Va -1) serves as a critical decision criterion in Space Vector Pulse Width Modulation (SVPWM) for inverter control. It determines whether inverter switches should be active or inactive based on the phase voltage, where Va represents the magnitude of the phase voltage in the ABC reference frame.
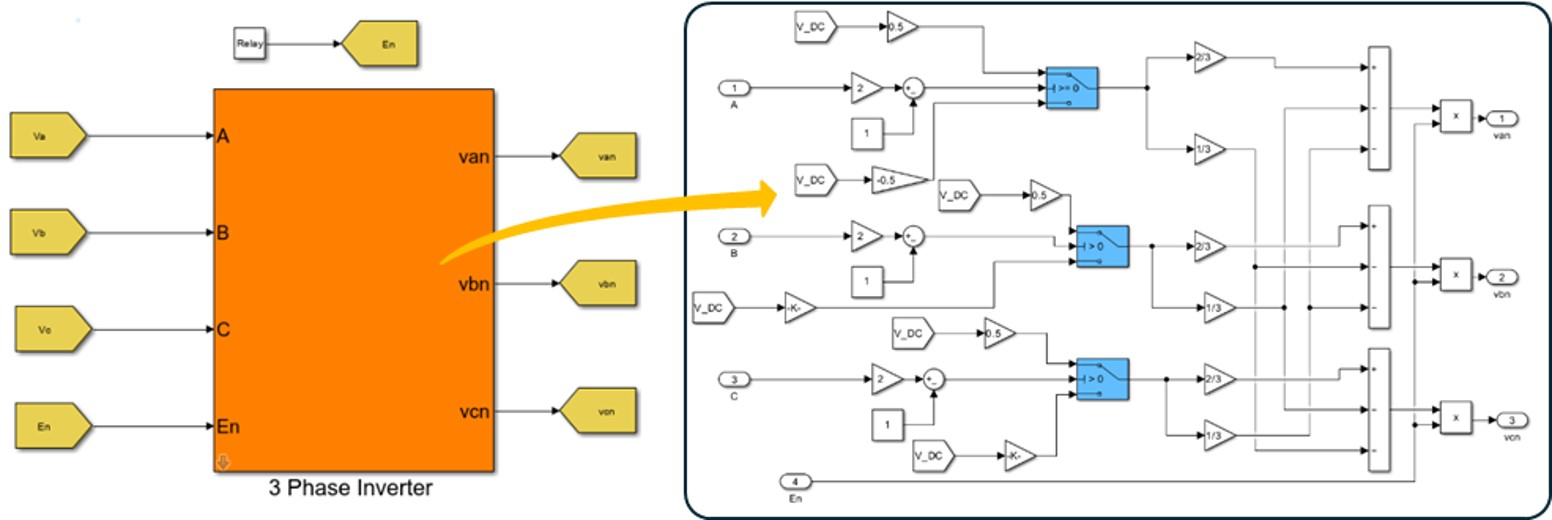
Fig 8. Simulink Inverter Implementation
PMSM-Modellierung
$$
\begin{aligned}
&\text{Equations to find flux:} \\
&\lambda_d = \frac{1}{s} \left( V_d + R_s i_d + \omega \lambda_q \right) \\
&\lambda_q = \frac{1}{s} \left( V_q + R_s i_q - \omega \lambda_d \right) \\
&\lambda_0 = \frac{1}{s} \left( V_0 + R_s i_0 \right) \\
&\lambda_{kd} = \frac{1}{s} \left( V_{kd} - R_k i_{kd} \right) \\
&\lambda_{kq} = \frac{1}{s} \left( V_{kq} + R_k i_{kq} \right) \\
&\lambda_{fd} = \frac{1}{s} \left( V_{fd} - R_f i_{fd} \right) \\
&\text{Equations to find currents:} \\
&\text{D-axis:} \\
&\lambda_d = -L_s i_d + L_{md} \left( -i_d + i_{fd} + i_{kd} \right) \\
&\lambda_{kd} = L_{kd} i_{kd} + L_{md} \left( -i_d + i_{fd} + i_{kd} \right) \\
&\lambda_{fd} = L_f i_{fd} + L_{md} \left( -i_d + i_{fd} + i_{kd} \right) \\
&\text{Q-axis:} \\
&\lambda_q = -L_q i_q + L_{mq} \left( -i_q + i_{kq} \right) \\
&\lambda_{kq} = -L_{kq} i_{kq} + L_{mq} \left( -i_q + i_{kq} \right)
\end{aligned}
$$
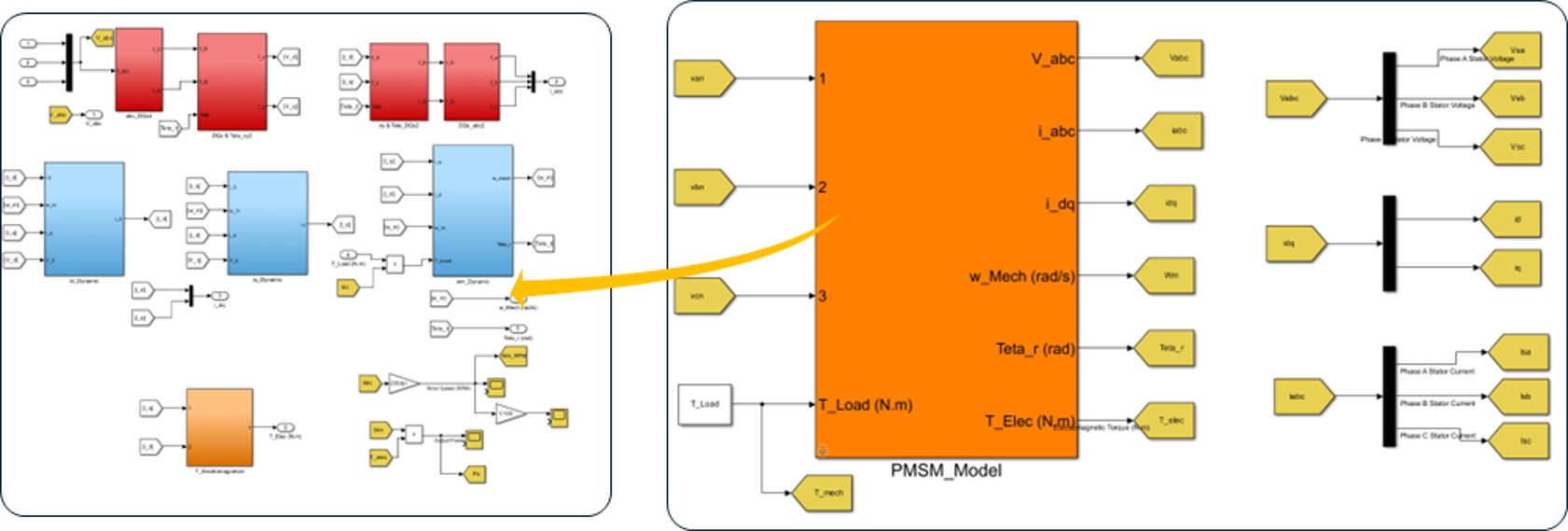
Fig 9. Simulink model of the motor
Das Simulink-Modell des Motors ist in Abb. 9 dargestellt. Alle Modelle sind nun erstellt. Bevor wir mit den Tests fortfahren, erfolgt die Einführung in Impedymes CHP-Technologie zur Echtzeit-Emulation.
Impedymes CHP-Technologie

Fig 10. Impedyme’s CHP Cabinet
CHP integriert nahtlos Hardware-in-the-Loop (HIL) und power hardware-in-the-loop (PHIL) Funktionenund bietet unvergleichliche Genauigkeit und Effizienz bei der Entwicklung von EVs. Mit CHP können Ingenieure realitätsnahe Szenarien präzise simulieren und EV-Komponenten sowie -Systeme unter dynamischen Bedingungen testen. Von Batteriemanagementsystemen bis zu Motorsteuerungen ermöglicht CHP Herstellern, die Leistung zu optimieren, die Zuverlässigkeit zu erhöhen und die Markteinführungszeit ihrer EVs zu verkürzen. Das modulare Design sorgt für Flexibilität, um sich an sich entwickelnde Testanforderungen anzupassen, während die intuitive Simulink-Oberfläche den Testprozess vereinfacht.
Zu den Merkmalen von Impedymes CHP gehören:

Die Emulationslösungen von Impedyme ahmen Ihre MATLAB-Simulink-Modelle nach und können für Hochleistungstests bis zu mehreren Megawatt und Bandbreiten bis zu 20 kHz eingesetzt werden. Verbinden Sie einfach die optischen Verbindungen mit unseren Schränken und starten Sie Ihre Tests. Jeder Schrank verfügt über mehrere optische Verbindungen mit bis zu 12,5 Gbit/s. Für Simulationen mit extrem kurzen Zeitschritten unterstützt die Ausrüstung FPGA-basierte Testsdie Zeitschritte von nur wenigen Nanosekunden ermöglichen. Zudem sorgt die FPGA-Verarbeitung für eine deutlich höhere Leistung bei Echtzeit-Emulationen im Vergleich zu einer CPU.
Für Simulationen mit extrem kurzen Zeitschritten unterstützt das System FPGA-basierte Tests mit Zeitschritten im Nanosekundenbereich. Aufgrund der hohen Verarbeitungsgeschwindigkeit bieten FPGAs gegenüber CPUs eine deutlich verbesserte Performance in der Echtzeit-Emulation. Für Hochgeschwindigkeitsemulationen können die einzelnen FPGAs innerhalb der Einschübe miteinander kommunizieren. Die Tests erfolgen direkt auf Basis von Simulink-Designs. Zudem stehen zahlreiche vorgefertigte Modelle zur Verfügung, die an spezifische Anforderungen angepasst werden können. Bei gleichzeitiger Emulation von Ein- und Ausgangsseite eines Leistungssystems kann ein zirkulierender Leistungsfluss realisiert werden. Da die Leistung im System rezirkuliert wird, muss lediglich die Verlustleistung aus dem Netz eingespeist werden. Dadurch reduzieren sich die Leistungsanforderungen des Labors bei Tests großer Leistungssysteme erheblich. Während der Echtzeit-Emulation sorgt ein integriertes Thermomanagement mit kombinierter Flüssigkeits- und Luftkühlung für eine effiziente Wärmeabfuhr, ohne dass zusätzliche Kühleinheiten erforderlich sind.
Während der Echtzeit-Emulation sorgt ein integriertes Thermomanagement mit kombinierter Flüssigkeits- und Luftkühlung für eine effiziente Wärmeabfuhr, ohne dass zusätzliche Kühleinrichtungen erforderlich sind. Somit wird Impedymes CHP zur Echtzeit-Emulation der entwickelten marinen Energiesystemmodelle eingesetzt.
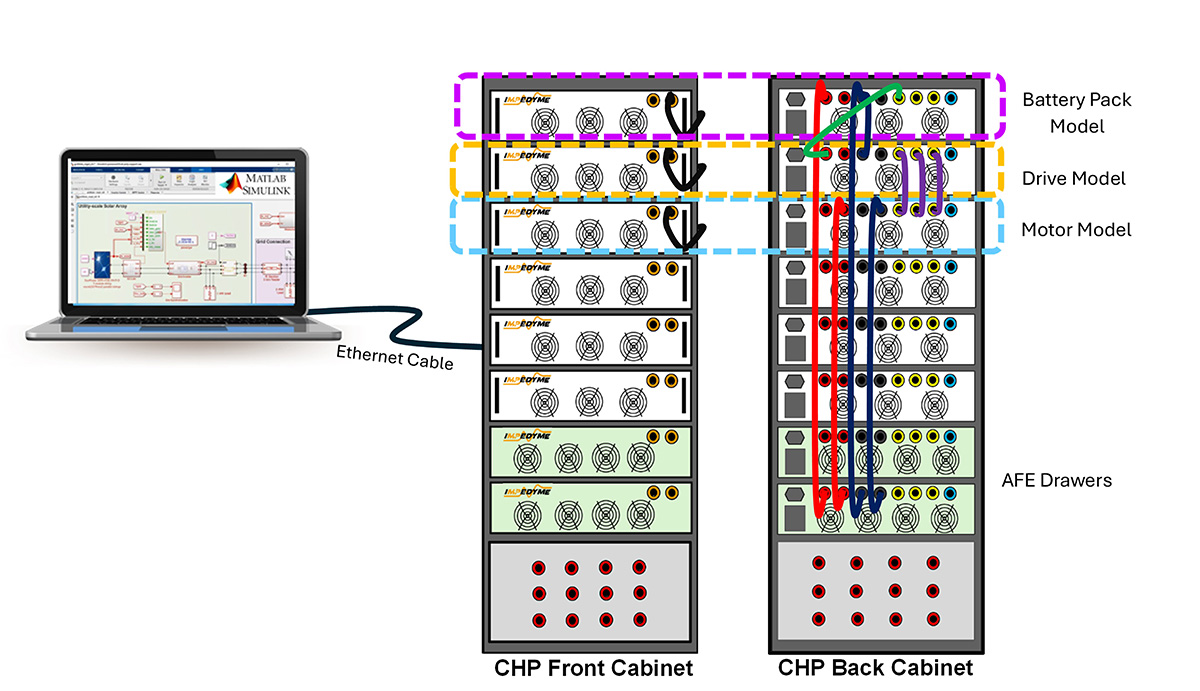
Fig 11. EV Emulation CHP Connection Diagram
Wir reservieren die erste Schublade (oben) für das Batteriemodell, die zweite für den Inverterantrieb und die dritte für das PMSM-Motormodell des EV. Die beiden untersten Schubladen sind für die Active Front-End Converter vorgesehen, die die DC-Kopplung für die Emulation bereitstellen.
Die Stromanschlüsse erfolgen an der Rückseite der Schränke. Die DC-Versorgung aus der Active Front-End-Schublade wird an die Batteriemodell-Schublade geleitet, und die Batteriespannung wird an den Eingang des Inverters weitergegeben. Die zweite Schublade emuliert die Funktion des Inverters und wandelt die DC-Spannung der Batterie in 3-phasige AC um (violette Verbindungen), die anschließend an die darunterliegende Motors-Schublade weitergegeben wird. Schließlich wird die DC-Kopplung vom Motor zurück zur Active Front-End-Schublade geführt, um einen zirkulierenden Leistungsfluss zu ermöglichen. Mit Abschluss der Anschlüsse ist das System testbereit.
Emulationsparameter & Versuchsergebnisse
Die Systemparameter für das Experiment lauten wie folgt:
Abb. 13 zeigt ein Beispiel für die Anpassungsfähigkeit des FOC-Systems an plötzliche Drehmomentänderungen. In diesem Fall sinkt die Drehmomentlast von 125 auf 75 Nm. Dies bestätigt die Robustheit des Reglers bei der Beibehaltung der Drehzahl trotz plötzlicher Laständerungen und validiert die Genauigkeit des Echtzeitmodells. Bemerkenswert ist, dass das Steuerungssystem diese Änderung innerhalb von 2 Sekunden effizient verfolgt, selbst bei zusätzlicher hoher Trägheitsbelastung. Da das Drehmoment auf 75 Nm reduziert wurde, fiel der Strom, während die Spannung kaum beeinflusst wurde. Die Drehzahl des Motors sank ebenfalls, jedoch folgt der Motor dank des integrierten Drehzahlreglers schnell dem Sollwert von 1500 RPM. Damit wird die Leistungsfähigkeit des Antriebsstrangs und die Genauigkeit des Controllers bestätigt.
Bereit, Ihr eigenes Antriebsstrang-Emulationssystem zu erstellen? Kontaktieren Sie unser Engineering-Team oder erkunden Sie unsere Simulink-integrierten CHP-Lösungen.
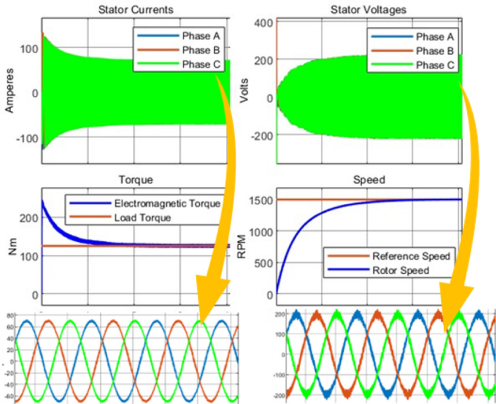
Fig 12. EV Powertrain Startup Transients
| Parameters | Value | Unit |
|---|---|---|
| \(\text{Power} \) | 20 | kW |
| \( \text{Pole pairs} \) | 4 | - |
| \( \text{Rated Speed} \) | 2000 | rpm |
| \( \text{Rated Torque} \) | 150 | Nm |
| \( \text{Stator Resistance} \) | 0.06 | Ohms |
| \(\text{d-Axis Inductance} \) | 0.452 | mH |
| \(\text{q-Axis Inductance} \) | 0.415 | mH |
| \(\text{PM Flux} \) | 0.3 | Wb |
| \(\text{Moment of Inertia (motor)} \) | 0.001980 | Kg m2 |
| \(\text{Moment of Inertia (added)} \) | 0.303 | Kg m2 |
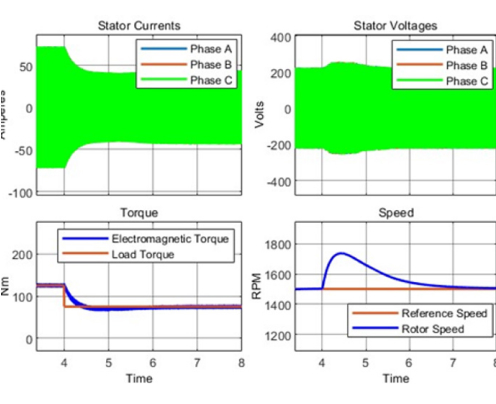
Fig 13. EV Powertrain Step-Load Change
| Parameters | Value | Unit |
|---|---|---|
| \(\text{Battery Capacity} \) | 200 | Ah |
| \(\text{Initial OCV} \) | 400 | V |
| \(\text{Initial SoC} \) | 100 | % |
| Parameters | RMS Value |
|---|---|
| \( \text{Stator Voltage} \) | 135.9 V |
| \( \text{Stator Currents} \) | 48.95 A |
Die Eingangsleistung wird wie folgt berechnet:
$$
P_{\text{input}} = 3 \times I_{s,\text{rms}} \times V_{s,\text{rms}} = 3 \times 48.95 \times 135.9
$$
$$
P_{\text{input}} = 19,956.91 \, \text{W}
$$
Die Ausgangsleistung wird wie folgt berechnet:
$$
P_{\text{output}} = \frac{2 \pi N T}{60} = \frac{2 \pi (1500)(125)}{60} = 19,634.95 \, \text{W}
$$
Abb. 13 illustriert erneut die Fähigkeit des FOC-Systems, plötzliche Drehmomentänderungen nachzuvollziehen. Die Anpassung erfolgt präzise und bestätigt die Leistung des Antriebsstrangs unter Echtzeitbedingungen.
Referenzen
-
A. Nazari, “Terminal Behavioral Modeling of Electric Machines for Real-Time Emulation and System-level Analyses”, Master’s Thesis, May 2022