
采用电机仿真器与逆变器测试的电动汽车永磁同步电机(PMSM)动力总成仿真
此示例展示了如何通过结合基于永磁同步电机(PMSM)的仿真与磁场定向控制,来模拟真实电动汽车动力总成的运行行为,以用于测试与验证。 在此,我们实现了一个磁场定向控制系统,用于调节电机的转速和转矩。
图 1. 电动汽车动力总成
图 1 展示了动力总成的结构,其中高压电池通过逆变器与电机相连。逆变器直接从电池获取电压,为电机的运行提供所需电能。
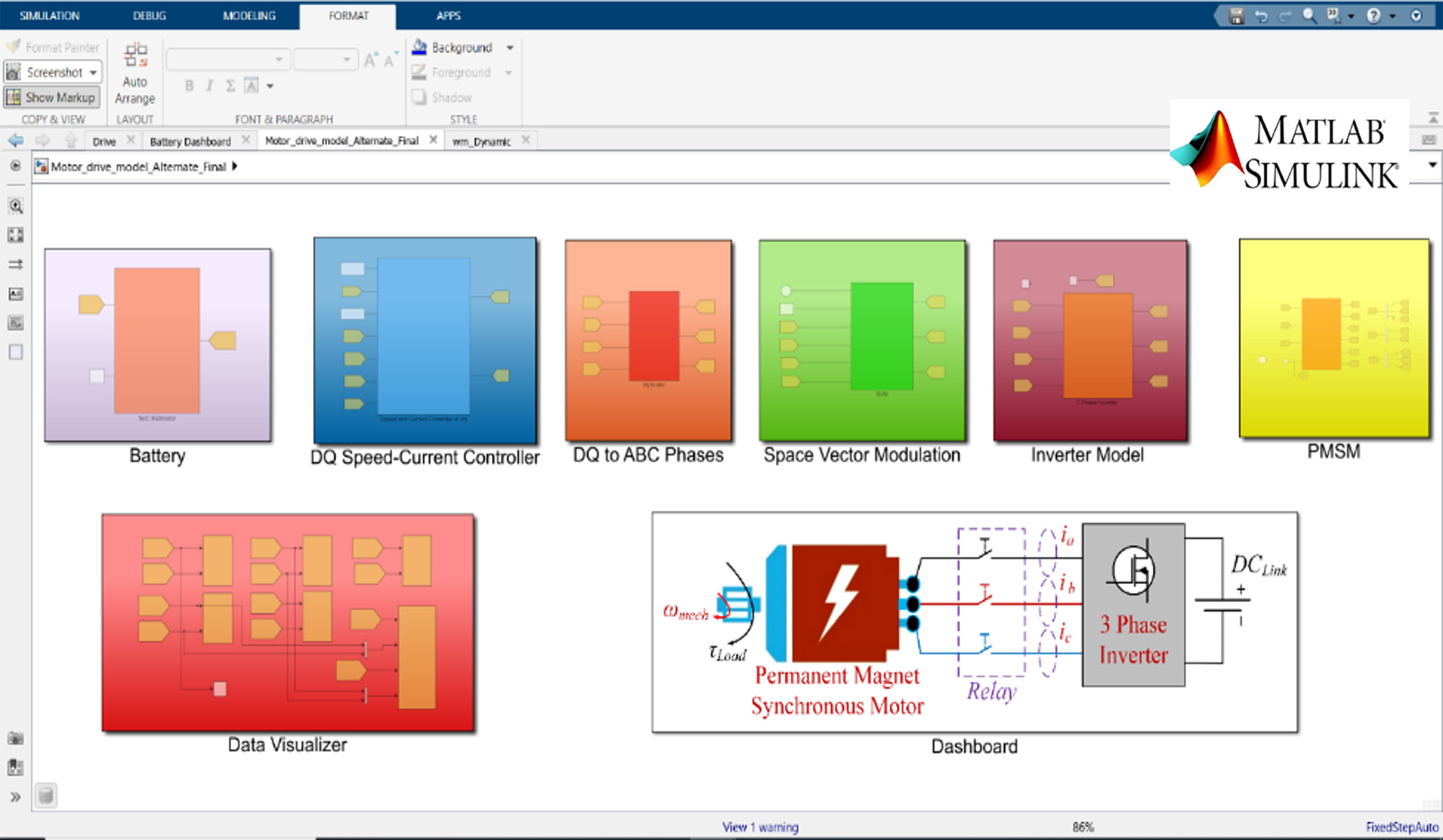
图 2. 电动汽车动力总成的 Simulink 实现
下面我们来看一下这些模块在 Simulink 中是如何建模的。
电动汽车模型实现:
电池组建模:
下图展示了电动汽车电池的 Simulink 模型。该模型依靠电池电流来估算荷电状态(SoC),并根据 SoC 动态预测开路电压。此库仑计数方法以其简洁性而闻名,主要依赖于电池组的放电过程。
$$I_{Battery} = frac{P_O}{V_{DC.Battery}}$$
$$SoC(t) = SoC_0 - int I_{Battery}(t) , dt$$
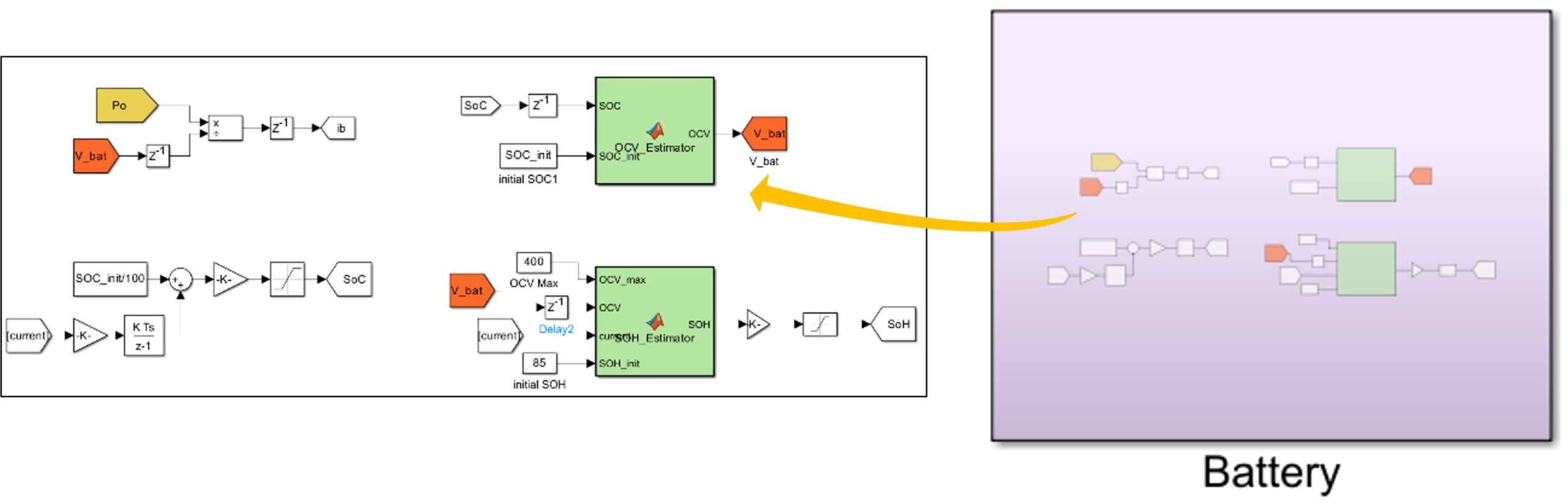
图 3. 电池的 Simulink 模型
驱动建模:
$$
\left[
\begin{array}{c}
\frac{d \tilde{l}_d}{d t} \\
\frac{d \tilde{l}_q}{d t} \\
\frac{d \widetilde{\omega}}{d t}
\end{array}
\right]
=
\left[
\begin{array}{ccc}
-\frac{R_s}{L_d} & \frac{L_q p}{L_d} W & \frac{L_q p}{L_d} I_q \\
-\frac{L_d p}{L_q} W & -\frac{R_s}{L_q} & -\frac{L_d p}{L_q} I_d - \frac{p \psi_f}{L_q} \\
\frac{3 p}{2 J} \left( L_d - L_q \right) I_q & \frac{3 p}{2 J} \left( \psi_f + \left( L_d - L_q \right) I_d \right) & -\frac{B}{J}
\end{array}
\right]
\left[
\begin{array}{c}
\tilde{l}_d \\
\tilde{l}_q \\
\widetilde{\omega}
\end{array}
\right]
+
\left[
\begin{array}{ccc}
\frac{1}{L_d} & 0 & 0 \\
0 & \frac{1}{L_q} & 0 \\
0 & 0 & -\frac{1}{J}
\end{array}
\right]
\left[
\begin{array}{c}
\tilde{v}_d \\
\tilde{v}_q \\
\tilde{t}
\end{array}
\right]
\quad
\begin{array}{l}
k_i = \omega_s^2 \frac{2 J_m}{K_T P} \\
k_p = \omega_s 2 \zeta \frac{2 J_m}{K_T P}
\end{array}
$$
该线性化模型表示一台永磁同步电机,用于在 Simulink 仿真中对电机驱动进行建模。模型中的矩阵描述了电流(i_d 和 i_q)以及电机转速的变化率。与之配合使用的是磁场定向控制(FOC)方案,其结构如图 4 所示。
此外,我们仿真所使用的控制参数是根据图下所示的公式推导得到的。其中,Lₙ 和 L_q 分别表示直轴和交轴电感;P 为极对数 λ𝑝𝑚 为电机的永磁磁链。
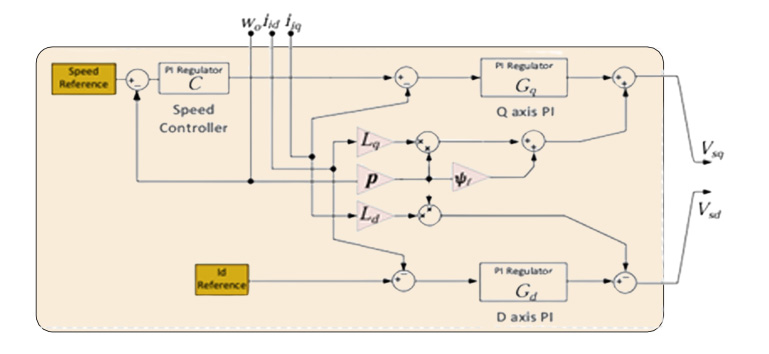
图 4. 永磁同步电机(PMSM)的磁场定向控制
该驱动的 Simulink 模型由四个子模块组成,分别为:DQ 速度-电流控制器、DQ 到 ABC 相变换器、空间矢量调制(SVM)功能模块,以及开关式逆变器模型。
速度-电流控制器的模型如图 5 所示,其中与永磁同步电机(PMSM)相关的电磁转矩方程被简化为仅包含 q 轴电流。
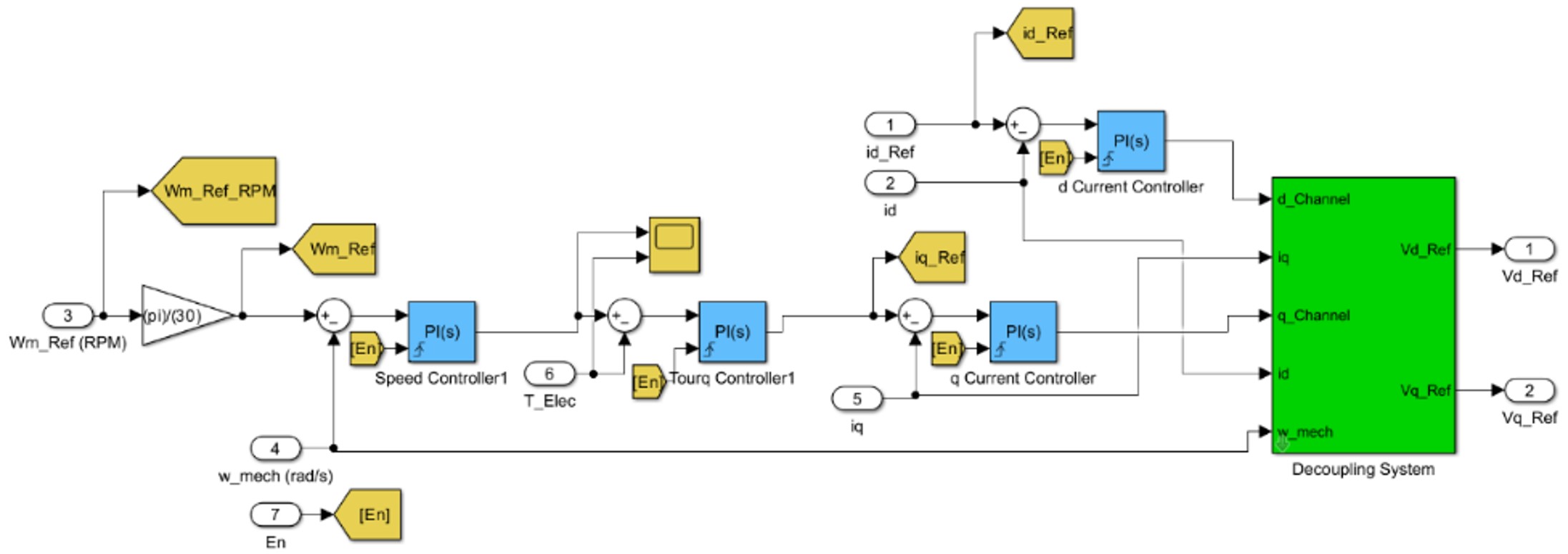
图 5. DQ 速度-电流控制器
驱动模型中的另一个子模块是 DQ 到 ABC 变换器,其输入为 Vd 参考值、Vq 参考值和转子角度,用于将 DQ 坐标转换为 ABC 三相。其 Simulink 模型如下所示:
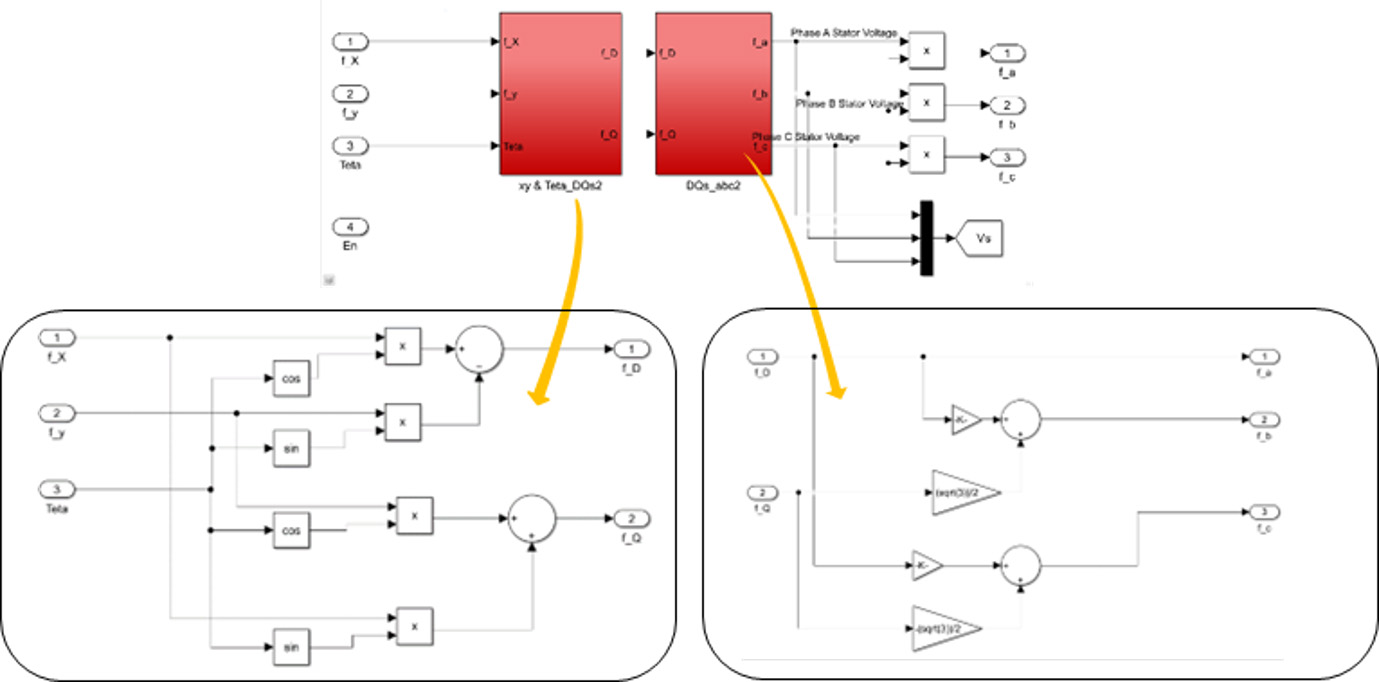
图 6. DQ 到 ABC 变换模型
空间矢量调制(SVM)是一种广泛用于控制逆变器输出电压的技术。当其应用于永磁同步电机(PMSM)的磁场定向控制(FOC)以调节速度和电流时,SVM 通过在电压空间矢量图中调制参考电压矢量,从而合成所需的输出电压波形,实现高效且精确的电机控制。
这可确保逆变器的输出电压能够紧密跟随电机最佳运行所需的参考电压。
在 SVM 中,逆变器的输出电压被表示为由六个或更多电压矢量在二维电压空间中以六边形方式排列的组合。SVM 通常采用一种称为空间矢量脉宽调制(SVPWM)的技术来生成逆变器的开关信号。SVPWM 通过调整电压矢量的脉冲宽度来计算开关器件的占空比,从而近似实现所需的空间电压矢量。
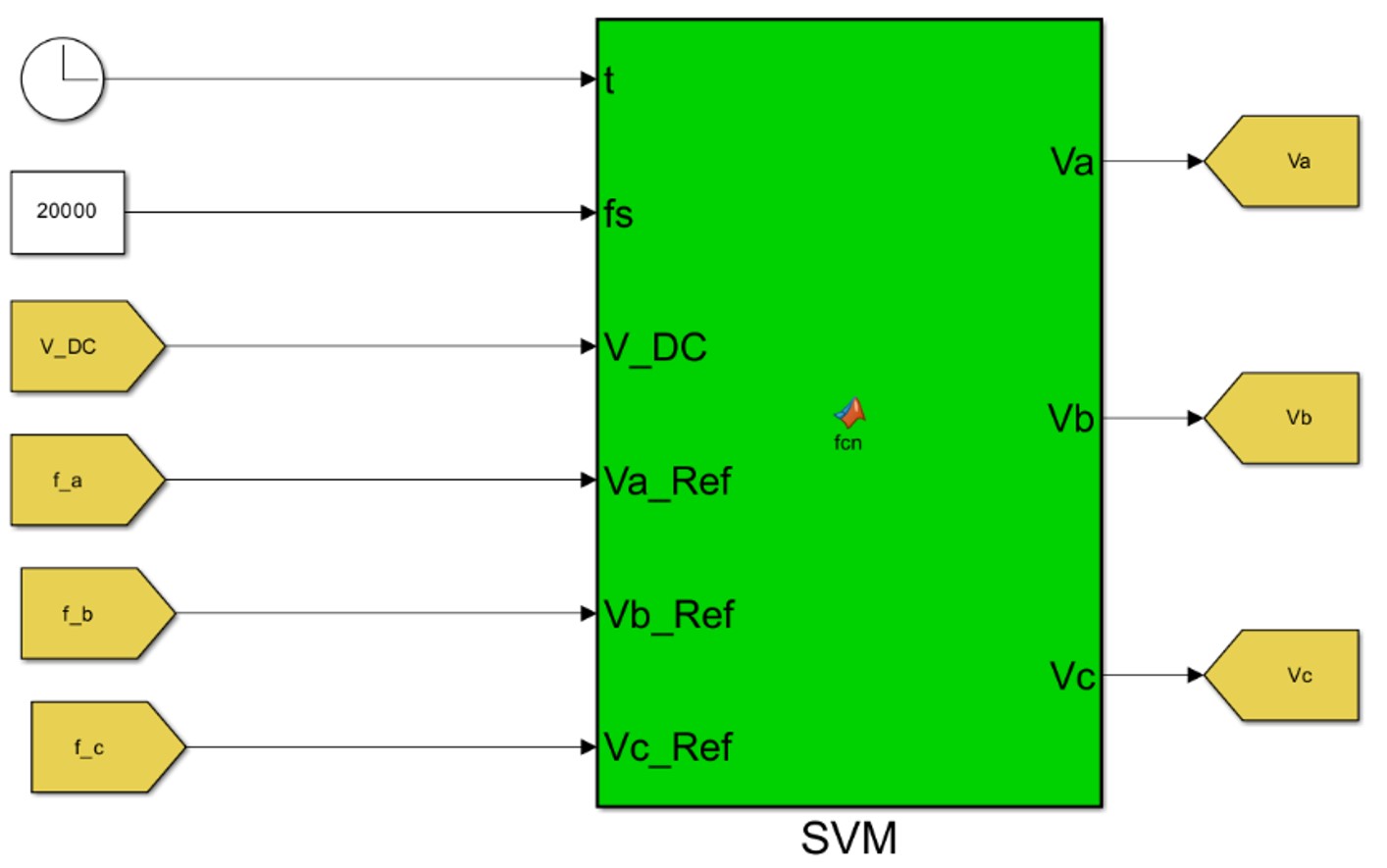
图 7. SVM 的 Simulink 功能实现
最后一个子模块展示了用于永磁同步电机(PMSM)磁场定向控制(FOC)的空间矢量脉宽调制(SVPWM)逆变器控制的实现,旨在实现速度与电流的调节。所生成的 SVPWM 根据信号空间矢量在六个扇区中的位置,为逆变器提供最优的开关信号。
$$D_i = frac{1}{2} left( 1 + m frac{V_i}{V_{dc}} right)$$
其中,m 为调制指数,Vᵢi 为电压矢量的幅值,V_dc 为来自电池的直流母线电压。此外,方程 2/3(Vₐ − 1)a 是空间矢量脉宽调制(SVPWM)中用于逆变器控制的重要判定准则。它根据相电压来决定逆变器开关的导通或关断状态,其中 Vₐ 表示 ABC 参考坐标系下的相电压幅值。
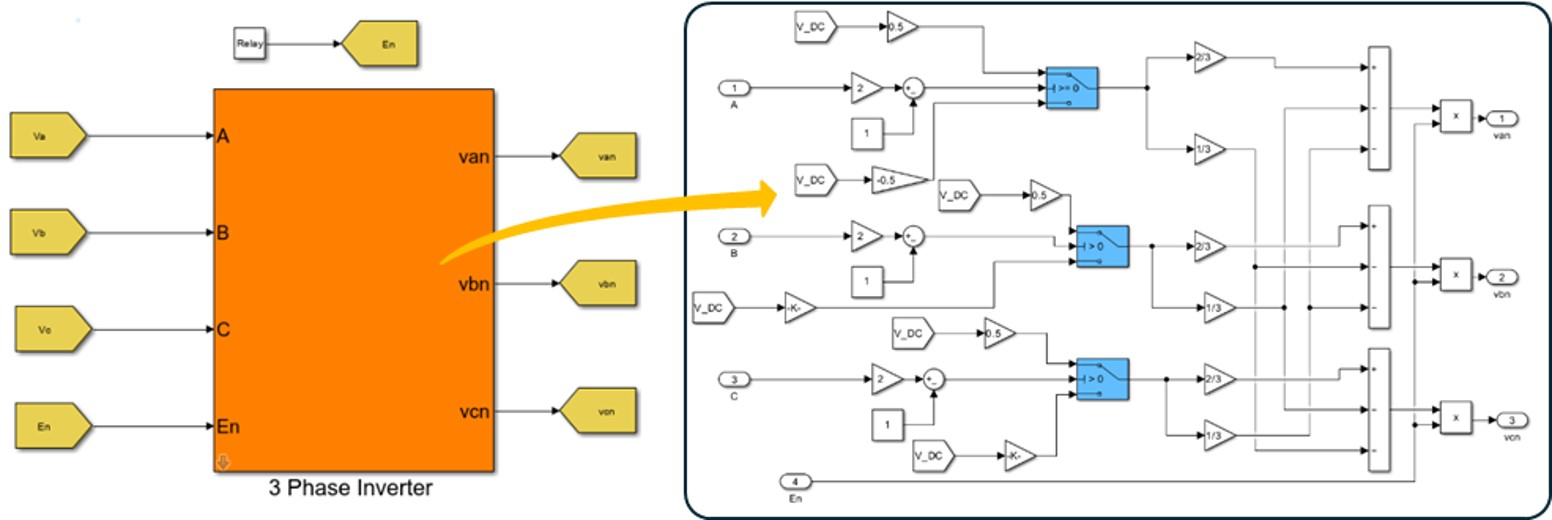
图 8. 逆变器的 Simulink 实现
永磁同步电机(PMSM)建模:
$$
\begin{aligned}
&\text{Equations to find flux:} \\
&\lambda_d = \frac{1}{s} \left( V_d + R_s i_d + \omega \lambda_q \right) \\
&\lambda_q = \frac{1}{s} \left( V_q + R_s i_q - \omega \lambda_d \right) \\
&\lambda_0 = \frac{1}{s} \left( V_0 + R_s i_0 \right) \\
&\lambda_{kd} = \frac{1}{s} \left( V_{kd} - R_k i_{kd} \right) \\
&\lambda_{kq} = \frac{1}{s} \left( V_{kq} + R_k i_{kq} \right) \\
&\lambda_{fd} = \frac{1}{s} \left( V_{fd} - R_f i_{fd} \right) \\
&\text{Equations to find currents:} \\
&\text{D-axis:} \\
&\lambda_d = -L_s i_d + L_{md} \left( -i_d + i_{fd} + i_{kd} \right) \\
&\lambda_{kd} = L_{kd} i_{kd} + L_{md} \left( -i_d + i_{fd} + i_{kd} \right) \\
&\lambda_{fd} = L_f i_{fd} + L_{md} \left( -i_d + i_{fd} + i_{kd} \right) \\
&\text{Q-axis:} \\
&\lambda_q = -L_q i_q + L_{mq} \left( -i_q + i_{kq} \right) \\
&\lambda_{kq} = -L_{kq} i_{kq} + L_{mq} \left( -i_q + i_{kq} \right)
\end{aligned}
$$
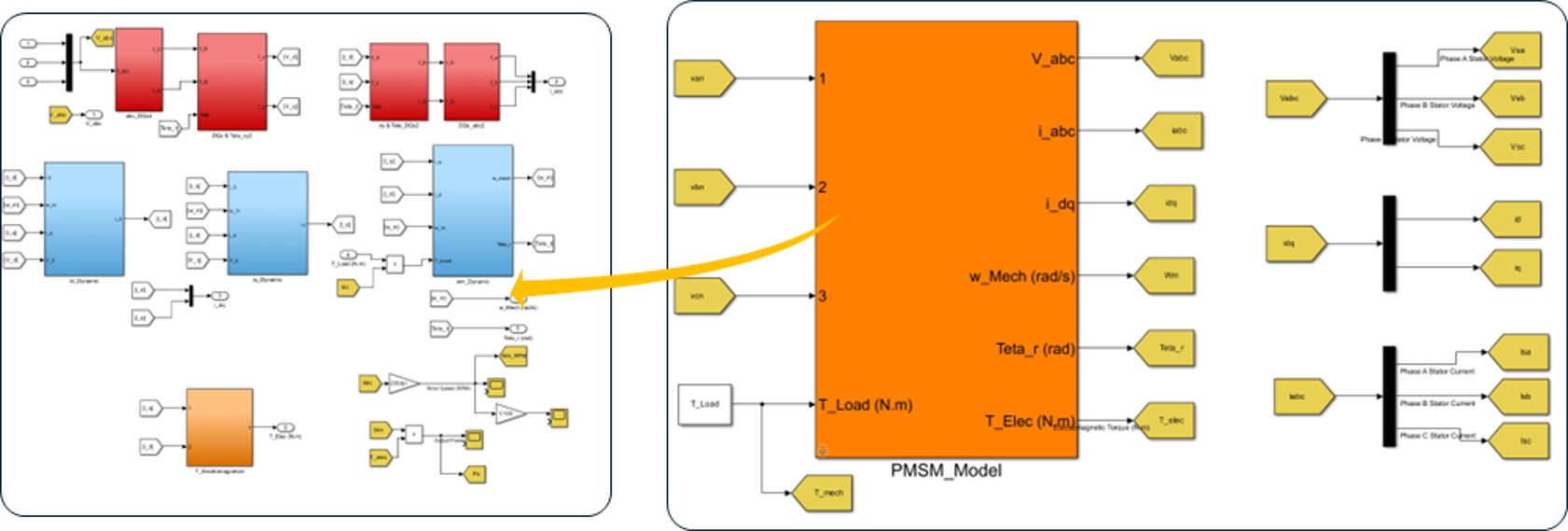
图 9. 电机的 Simulink 模型
电机的 Simulink 模型如图 9 所示。至此,所有模型均已建立,在进行测试之前,让我们先了解一下 Impedyme 的 CHP 技术。
Impedyme 的 CHP 技术:

图 10. Impedyme 的 CHP 机柜
CHP 技术将 用于硬件在环(HIL) 与 功率硬件在环(PHIL) 功能无缝集成,在电动汽车开发中提供了无与伦比的精度与效率。借助 CHP,工程师能够高精度地模拟真实工况,在动态条件下测试电动汽车的各类组件与系统。从电池管理系统到电机控制器,CHP 帮助制造商优化性能、提升可靠性,并加速电动汽车的上市进程。其模块化设计确保了对不断变化的测试需求的灵活适应,而直观的 Simulink 界面则简化了测试流程。
Impedyme CHP 的部分功能特点包括:

Impedyme 的仿真解决方案可精确复现您的 MATLAB Simulink 模型,可用于高功率测试,功率范围可达数兆瓦,带宽最高可达 20 kHz。您只需将光纤链路连接到我们的机柜,并部署您的模型即可开始测试。 每个机柜配备多条光纤链路,每条链路速率高达 12.5 Gbps。对于具有超低步长时间的仿真,设备支持基于 FPGA 的测试可实现纳秒级的时间步长。此外,由于 FPGA 的处理速度远高于 CPU,使用 FPGA 进行实时仿真能够显著提升系统性能与响应速度。
此外,对于高速仿真,各抽屉内的独立 FPGA 之间可以实现相互通信。借助 Impedyme 的 CHP,测试过程非常简便,因为它直接使用 Simulink 设计。我们的产品配备了丰富的预设模型,用户可根据自身需求进行自定义设计。 此外,如果同时对电力系统的输入端与输出端进行仿真,就可以实现功率的循环流动。由于功率被循环利用,因此只需从电网补偿系统中的功率损耗。采用此类技术可以显著降低实验室在测试大功率系统时的能耗需求。 同时,在模型的实时仿真过程中,我们的集成式热管理系统采用先进的“液冷 + 风冷”混合冷却技术,无需额外的冷水机即可实现高效散热。 因此,我们使用 Impedyme 的 CHP 对所开发的动力总成模型进行实时仿真。
既然我们已经开发完成了整套动力系统模型,现在让我们看看如何进行连接以启动测试过程。
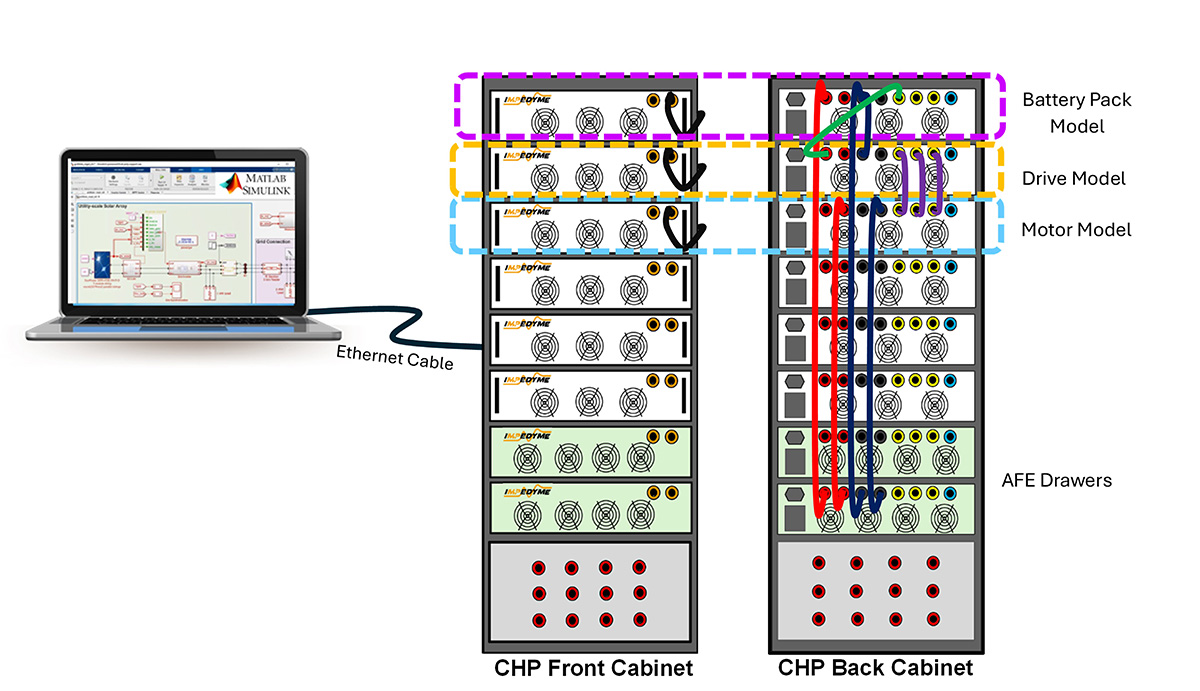
图 11. 电动汽车仿真 CHP 连接示意图
我们将第一个抽屉(最上层抽屉)分配给电池模型,第二个抽屉用于逆变器驱动。同样地,第三个抽屉专用于电动汽车的永磁同步电机(PMSM)模型。最后两个,也就是最底部的两个抽屉,用于有源前端转换器,为仿真系统提供直流耦合。
现在,让我们来看一下这些抽屉之间的连接方式。电源连接位于机柜的背面。来自有源前端抽屉的直流电源供给电池模型抽屉,而电池电压则作为输入电源提供给逆变器。第二个抽屉仿真逆变器的运行,将来自电池的直流电转换为三相交流电(紫色连接),然后输送至下方的电机抽屉。最后,来自电机的直流耦合电能回馈至有源前端抽屉,实现功率的循环流动。连接完成后,我们便可以开始测试。
仿真参数与实验结果
本次实验的系统参数如下所示。
图 13 展示了磁场定向控制(FOC)系统对转矩负载突变的适应能力。在此示例中,转矩负载由 125 Nm 减小至 75 Nm。 这验证了控制器在面对转矩突变时仍能保持转速的稳健性,从而证明了实时模型的准确性。 值得注意的是,即使在施加较大的额外转动惯量负载的情况下,控制系统仍能在 2 秒内高效响应这一变化。由于转矩减小至 75 Nm,电流相应下降,而电压几乎未受到影响。同样,电机转速出现短暂下降,但由于系统配备了速度控制器,电机能够迅速跟踪速度设定值(1500 RPM)。因此,这验证了动力总成及控制器的性能。
准备好构建您自己的动力总成仿真系统了吗?欢迎联系我们的工程团队,或探索我们与 Simulink 集成的 CHP 解决方案。
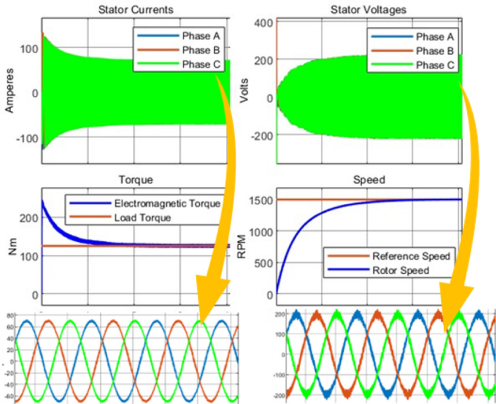
图 12. 电动汽车动力总成启动瞬态
| 参数 | 数值 | 单位 |
|---|---|---|
| \(\text{功率} \) | 20 | kW |
| \( \text{极对数} \) | 4 | - |
| \( \text{额定转速} \) | 2000 | rpm |
| \( \text{额定转矩} \) | 150 | Nm |
| \( \text{定子电阻} \) | 0.06 | Ohms |
| \(\text{d 轴电感} \) | 0.452 | mH |
| \(\text{q 轴电感} \) | 0.415 | mH |
| \(\text{永磁磁链} \) | 0.3 | Wb |
| \(\text{转动惯量(电机)} \) | 0.001980 | Kg m2 |
| \(\text{转动惯量(附加)} \) | 0.303 | Kg m2 |
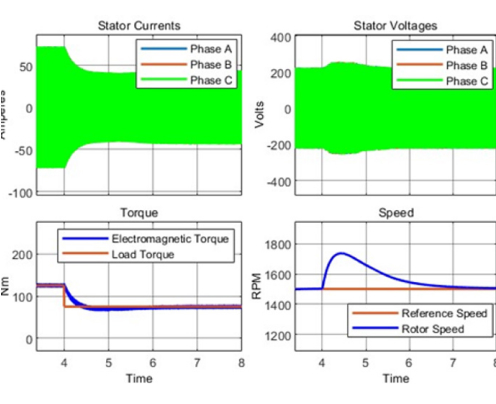
图 13. 电动汽车动力总成阶跃负载变化
| 参数 | 数值 | 单位 |
|---|---|---|
| \(\text{电池容量} \) | 200 | Ah |
| \(\text{初始开路电压(OCV)} \) | 400 | V |
| \(\text{初始荷电状态(SoC)} \) | 100 | % |
| 参数 | RMS Value |
|---|---|
| \( \text{定子电压} \) | 135.9 V |
| \( \text{定子电流} \) | 48.95 A |
因此,输入功率计算如下,
$$
P_{\text{input}} = 3 \times I_{s,\text{rms}} \times V_{s,\text{rms}} = 3 \times 48.95 \times 135.9
$$
$$
P_{\text{input}} = 19,956.91 \, \text{W}
$$
同样,输出功率计算为,
$$
P_{\text{output}} = \frac{2 \pi N T}{60} = \frac{2 \pi (1500)(125)}{60} = 19,634.95 \, \text{W}
$$
图 13 展示了磁场定向控制(FOC)系统对转矩负载突变的适应能力。在此示例中,转矩负载由 125 Nm 减小至 75 Nm。值得注意的是,即使在施加较大的额外转动惯量负载的情况下,控制系统仍能在 2 秒内高效响应这一变化。由于转矩减小至 75 Nm,电流相应下降,而电压几乎未受到影响。同样,电机转速出现短暂下降,但由于系统配备了速度控制器,电机能够迅速跟踪速度设定值(1500 RPM)。因此,这验证了动力总成及控制器的性能
参考文献
-
A. Nazari,《电机的端口行为建模用于实时仿真与系统级分析》,硕士论文,2022 年 5 月。