
Marine-Energiesysteme
Elektrische Antriebssysteme in der Schifffahrt stellen eine umweltfreundliche Alternative zu herkömmlichen Antriebsmethoden dar. Diese Systeme verwenden Elektromotoren zum Antrieb der Propeller und ersetzen damit konventionelle Dampf- oder Verbrennungsmotoren. Durch die Nutzung elektrischer Energie aus verschiedenen Quellen – wie Generatoren, Batterien oder erneuerbaren Energien wie Solar- und Windkraft – ermöglichen marinelektrische Antriebssysteme einen sauberen und flexiblen Betrieb.
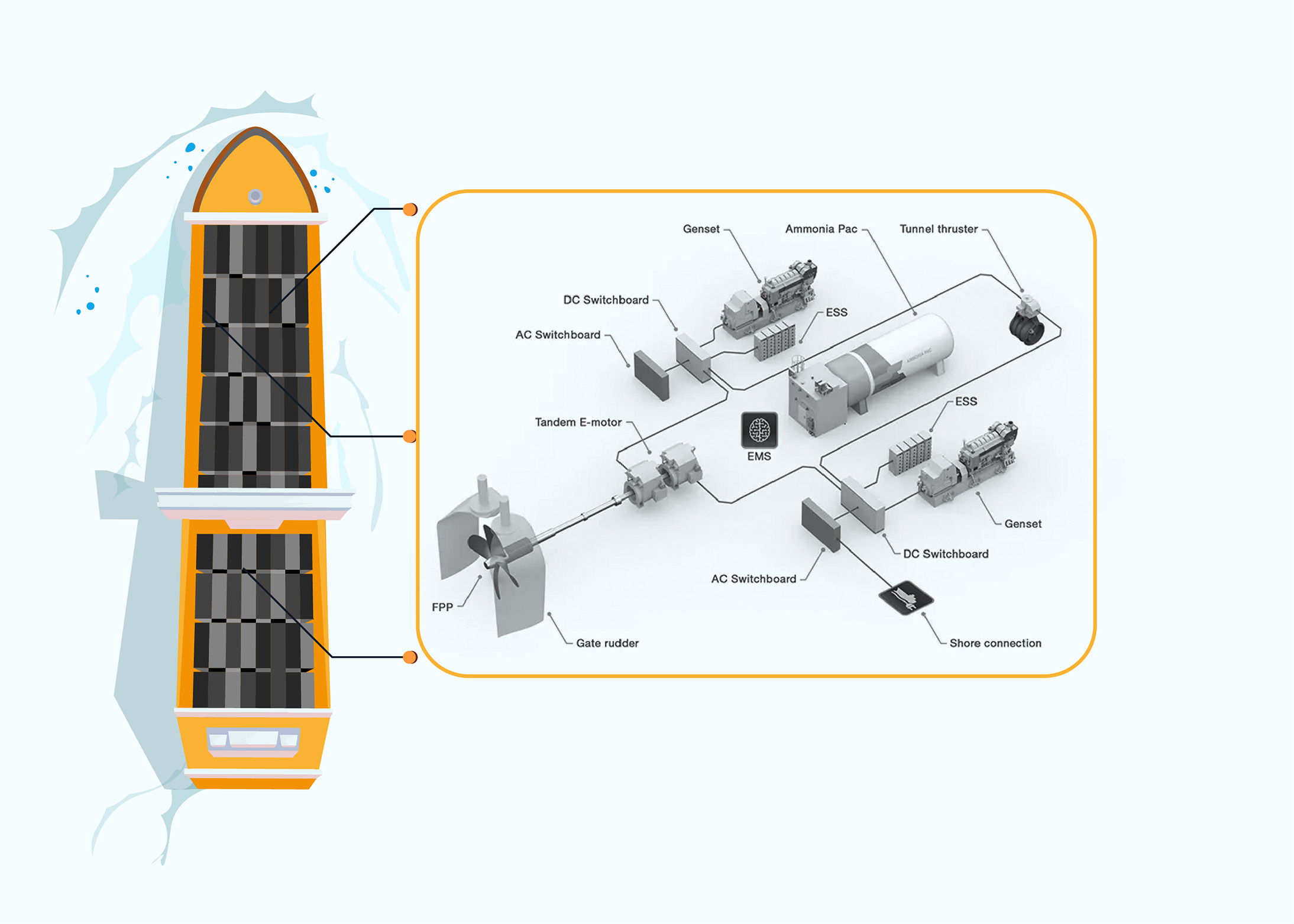
Fig 1. Marine Propulsion Power Systems
Abbildung 1 zeigt ein marines Antriebsenergiesystem. Einer der wesentlichen Vorteile elektrischer Schiffsantriebe ist ihr Potenzial zur Reduzierung von CO₂-Emissionen. Im Gegensatz zu traditionellen Motoren, die fossile Brennstoffe verbrennen und Schadstoffe freisetzen, verursachen elektrische Antriebssysteme am Einsatzort nur minimale Emissionen. Sie stellen daher eine geeignete Option für Schiffe dar, die ihre Umweltbelastung verringern und Emissionsvorschriften einhalten möchten.
Neben ihrer Umweltfreundlichkeit zeichnen sich marinelektrische Antriebssysteme durch eine hohe Energieeffizienz aus. Elektromotoren ermöglichen eine präzise Steuerung von Drehzahl und Leistung, wodurch Schiffe ihren Energieverbrauch optimieren können. Dies führt zu Kraftstoffeinsparungen und geringeren Betriebskosten. Darüber hinaus erlaubt die Flexibilität elektrischer Antriebssysteme hybride Konfigurationen, bei denen verschiedene Energiequellen kombiniert werden, um Effizienz und Leistungsfähigkeit zu maximieren.
Ein weiterer Vorteil ist die Reduzierung von Vibrationen und Geräuschen. Elektromotoren arbeiten leiser und gleichmäßiger als herkömmliche Motoren, wodurch eine ruhigere und komfortablere Umgebung für Besatzung und Passagiere entsteht. Dies ist insbesondere bei Passagierschiffen wie Fähren von großer Bedeutung.
Marinelektrische Antriebssysteme besitzen somit das Potenzial, die maritime Industrie durch sauberere und effizientere Antriebstechnologien grundlegend zu verändern. In Zukunft werden sie eine zentrale Rolle bei der Gestaltung einer nachhaltigen maritimen Mobilität spielen. In diesem Beitrag wird erläutert, wie die Simulation eines marinen Energiesystems durchgeführt wird und wie diese mithilfe von Impedymes CHP auf voller Leistungsstufe in Echtzeit emuliert werden kann.
Warum Emulation mariner Energiesysteme?
Die Echtzeit-Emulation mariner Energiesysteme ist essenziell für die Prüfung und Validierung von Leistung und Sicherheit mariner Antriebssysteme unter kontrollierten und effizienten Bedingungen. Durch die Nachbildung realer Betriebsbedingungen von Schiffen können unterschiedliche Szenarien simuliert werden, ohne die Risiken und Kosten von Feldversuchen einzugehen.
Ein wesentlicher Grund für den Einsatz der Echtzeit-Emulation ist die Bewertung des Systemverhaltens unter verschiedenen Last- und Betriebsbedingungen, einschließlich Normalbetrieb und möglicher Fehlerfälle. Dadurch können unterschiedliche Designs und Regelstrategien getestet werden, um einen sicheren und effizienten Betrieb auch bei rauer See oder plötzlichen Laständerungen zu gewährleisten.
Darüber hinaus bietet die Echtzeit-Emulation eine wertvolle Plattform zur Optimierung der Systemleistung. Durch die Untersuchung verschiedener Energiequellen, Speicherlösungen und Regelalgorithmen lassen sich optimale Konfigurationen für elektrische Schiffsantriebe identifizieren. Dies führt zu höherer Energieeffizienz, geringeren Emissionen und reduzierten Betriebskosten.
Ein weiterer Vorteil liegt in der Integration erneuerbarer Energien und moderner Technologien in marine Energiesysteme. Durch die Simulation von Solar-, Wind- oder anderen erneuerbaren Energiequellen können hybride Antriebssysteme entwickelt werden, die konventionelle und erneuerbare Energiequellen kombinieren und so Effizienz sowie Nachhaltigkeit steigern.
Die Echtzeit-Emulation mariner Energiesysteme trägt somit maßgeblich zur Entwicklung effizienter und umweltfreundlicher Antriebstechnologien in der maritimen Industrie bei.
Simulink-Modell mariner Energiesysteme
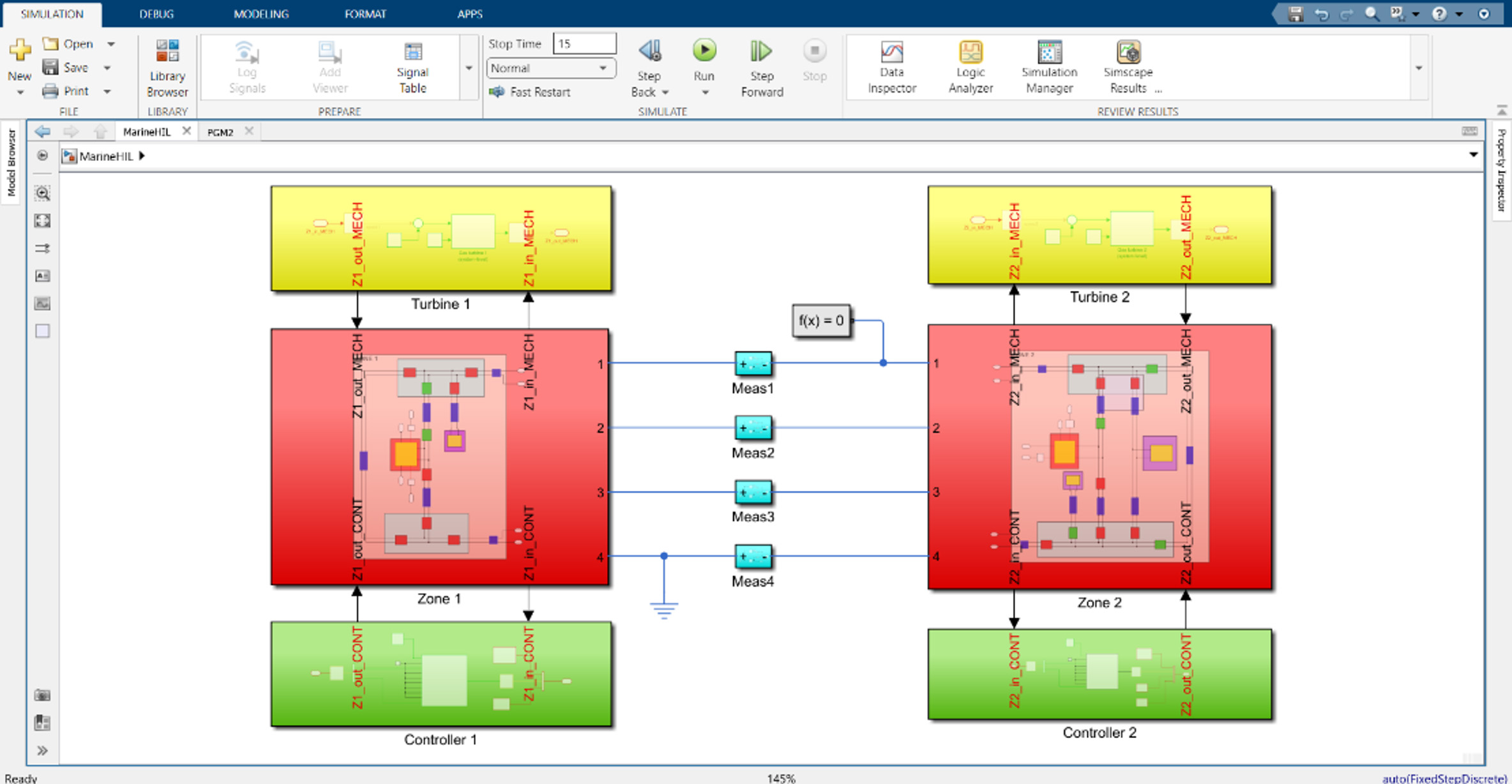
Fig 2. Marine Power Systems Simulink Model
Das Energiesystemmodell wurde entwickelt, um das Verhalten und den Betrieb eines modernen marinen Energiesystems realitätsnah abzubilden. Es umfasst Synchrongeneratoren sowie LC-Filter zur Sicherstellung von Spannungsqualität und Systemstabilität. Zusätzlich sind 30 Leistungsschalter und 20 unterschiedliche Lasten integriert, um die vielfältigen elektrischen Anforderungen in einer maritimen Umgebung realistisch darzustellen. Die Einbindung von zwei elektrischen Antrieben sowie zwei Landstromquellen unterstreicht die Multifunktionalität des Modells, da unterschiedliche Betriebszustände und Energiequellen, wie sie in marinen Anwendungen vorkommen, simuliert werden können.
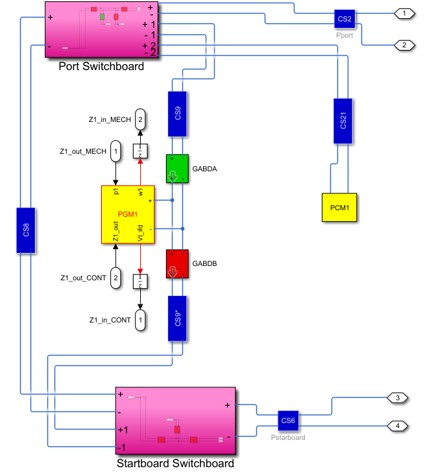
Fig 3. Zone 1 Model
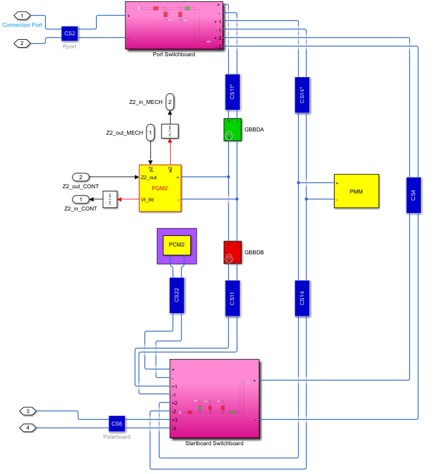
Fig 4. Zone 2 Model
Das Bordenergiesystemmodell stellt dar, wie elektrische Energie auf einem Schiff erzeugt, verteilt und verwaltet wird. In diesem Modell gibt es zwei Hauptzonen, die jeweils mit Stromerzeugern und etwa vier Schaltanlagen ausgestattet sind, um die elektrische Energieverteilung im gesamten Schiff zu gewährleisten.
Der im Bereich 2 des marinen Energiesystemmodells vorhandene Antriebsmotor ist als permanenterregte Synchronmaschine mit feldorientierter Regelung modelliert. Dieses Konzept ermöglicht eine präzise Steuerung des Schiffsantriebs und gewährleistet stabile Navigationseigenschaften unter unterschiedlichen maritimen Bedingungen.
Die Stromerzeuger (PG-Einheiten) sind als von Gasturbinen angetriebene Synchronmaschinen modelliert. Sie sind mit Drehzahlreglern (Governor-Modellen) ausgestattet, die die Motordrehzahl regeln und eine stabile Leistungsabgabe sicherstellen. Automatische Spannungsregler und Erregersysteme sorgen für konstante Spannungsniveaus im System, was für den zuverlässigen Betrieb der elektrischen Komponenten an Bord entscheidend ist.
Das System nutzt zudem eine AC/DC-Umwandlung, um unterschiedlichen elektrischen Anforderungen gerecht zu werden. Diese Umwandlung ist insbesondere erforderlich, da sie eine gezielte DC-Spannungs-Droop-Regelung ermöglicht, welche die Lastaufteilung zwischen den Generatoren steuert. Dadurch wird sichergestellt, dass jeder Generator seinen angemessenen Anteil zur Gesamtleistung beiträgt.
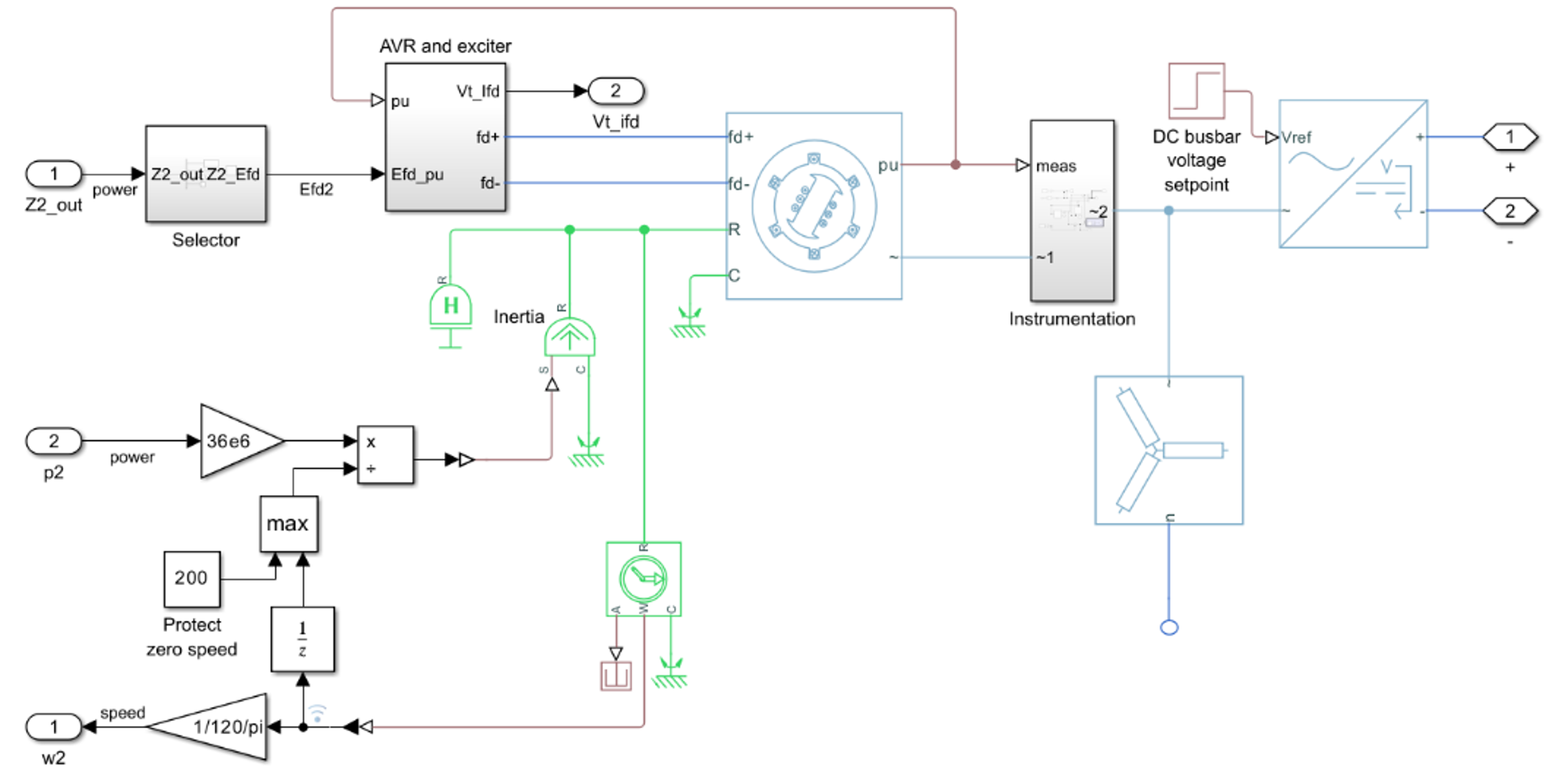
Fig 5. Generator Model
Durch die ausgewogene Leistungsverteilung zwischen den Generatoren arbeitet das Bordenergiesystem effizient und zuverlässig. Dieses Maß an Kontrolle ist wesentlich für die elektrische Stabilität des Schiffes und die Optimierung seiner Gesamtleistung – sei es für den Antrieb, Bordsysteme oder andere betriebliche Anforderungen. Nachdem die Modelle der marinen Energiesysteme in Simulink erstellt wurden, folgt nun die Einführung in Impedymes CHP-Technologie zur Echtzeit-Emulation und Prüfung der entwickelten Modelle.
Impedymes CHP-Technologie

Fig 6. Impedyme’s CHP Cabinet
CHP integriert nahtlos Hardware-in-the-Loop (HIL) und power hardware-in-the-loop (PHIL) und bietet höchste Genauigkeit und Effizienz in der Entwicklung elektrischer Antriebssysteme. Mit CHP können Ingenieure reale Szenarien präzise simulieren und EV-Komponenten sowie Gesamtsysteme unter dynamischen Bedingungen testen. Von Batteriemanagementsystemen bis hin zu Motorreglern unterstützt CHP Hersteller bei der Leistungsoptimierung, Zuverlässigkeitssteigerung und Verkürzung der Markteinführungszeit. Das modulare Design gewährleistet Flexibilität bei sich ändernden Testanforderungen, während die intuitive Simulink-Schnittstelle den Prüfprozess vereinfacht.
Zu den Merkmalen von Impedymes CHP gehören:

Die Emulationslösungen bilden MATLAB-Simulink Modelle für Hochleistungstests im Multi-Megawatt-Bereich bei Bandbreiten bis zu 20 kHz nach. Über optische Verbindungen werden die Modelle auf die Cabinets übertragen und unmittelbar getestet. Jedes Cabinet verfügt über mehrere optische Links mit Datenraten von bis zu 12,5 Gbit/s.
Für Simulationen mit extrem kurzen Zeitschritten unterstützt das System FPGA-basierte Tests mit Zeitschritten im Nanosekundenbereich. Aufgrund der deutlich höheren Verarbeitungsgeschwindigkeit eines FPGA im Vergleich zu einer CPU wird eine verbesserte Echtzeit-Performance erreicht. Für Hochgeschwindigkeitsemulationen können die einzelnen FPGAs innerhalb der Einschübe miteinander kommunizieren. Die Tests erfolgen direkt auf Basis von Simulink-Designs. Zudem stehen zahlreiche vorgefertigte Modelle zur Verfügung, die an spezifische Anforderungen angepasst werden können. Bei gleichzeitiger Emulation von Ein- und Ausgangsseite eines Leistungssystems kann ein zirkulierender Leistungsfluss realisiert werden. Da die Leistung intern rezirkuliert wird, muss lediglich die Verlustleistung aus dem Netz eingespeist werden. Dadurch lassen sich die Leistungsanforderungen des Labors bei Tests großer Leistungssysteme erheblich reduzieren.
Während der Echtzeit-Emulation sorgt ein integriertes Thermomanagement mit kombinierter Flüssigkeits- und Luftkühlung für eine effiziente Wärmeabfuhr, ohne dass zusätzliche Kühleinrichtungen erforderlich sind. Somit wird Impedymes CHP zur Echtzeit-Emulation der entwickelten marinen Energiesystemmodelle eingesetzt.
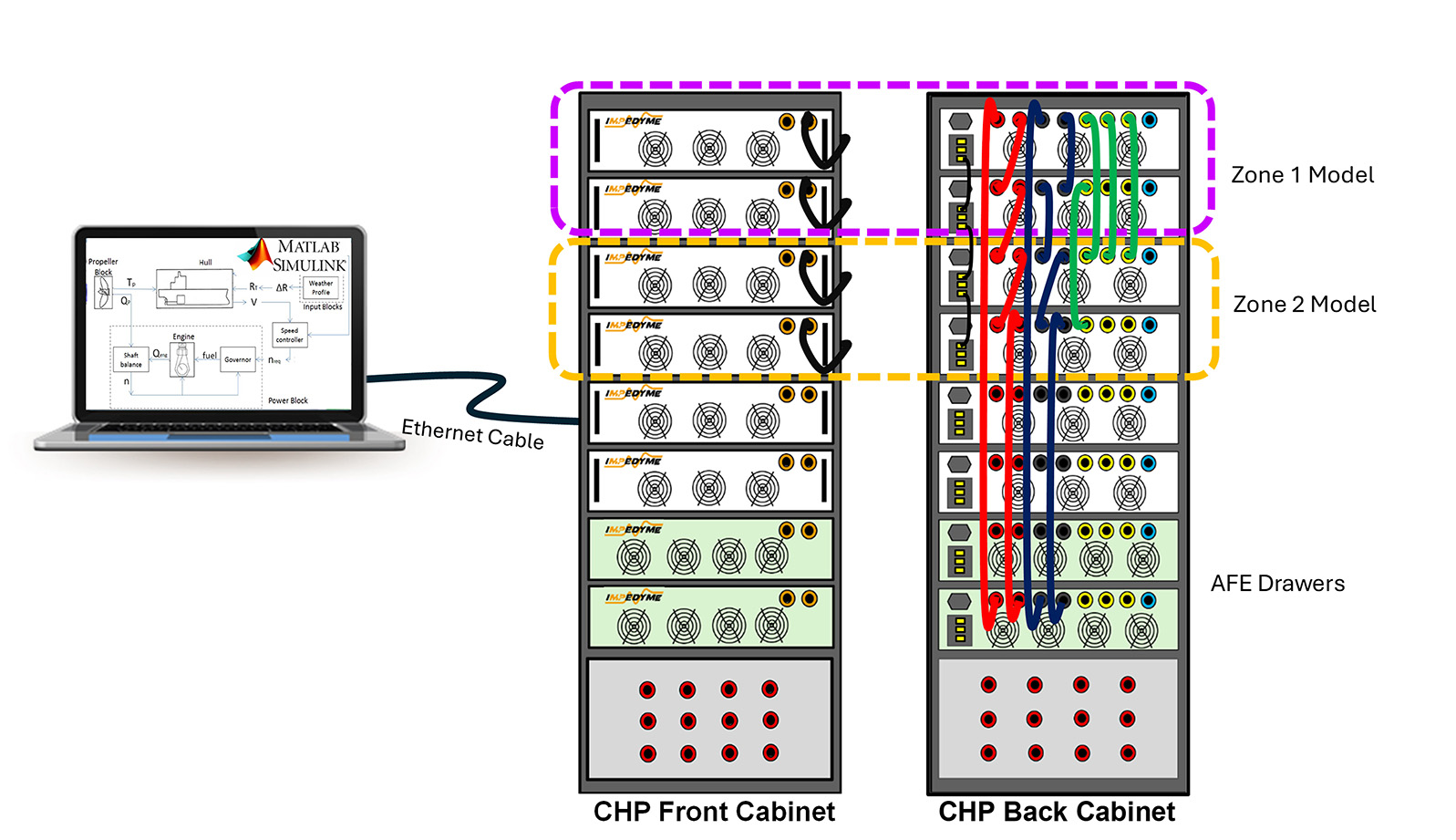
Fig 7. Marine Power Systems Emulation: Impedyme’s CHP Connection Diagram
Nach Entwicklung des vollständigen Antriebsstrangmodells wird nun die Verschaltung für den Testbetrieb beschrieben. Die beiden obersten Einschübe sind dem Modell von Zone 1 zugeordnet. Die beiden darauffolgenden Einschübe sind für Zone 2 vorgesehen. Die beiden untersten Einschübe enthalten Active-Front-End-Konverter, die die DC-Kopplung für die Emulation bereitstellen.
Die Leistungsanschlüsse befinden sich auf der Rückseite der Cabinets. Die DC-Versorgung aus dem Active-Front-End-Einschub wird dem Zone-1-Einschub zugeführt, und die Spannungen von Zone 1 werden mit denen von Zone 2 gekoppelt. Die darunterliegenden Einschübe emulieren die Funktion von Zone 2 einschließlich des Antriebsmotormodells. Abschließend wird die DC-Kopplung von Zone 2 zurück zum Active-Front-End-Einschub geführt, um einen zirkulierenden Leistungsfluss zu realisieren. Nach Abschluss der Verschaltung ist das System bereit für die Tests.
Simulation Results:
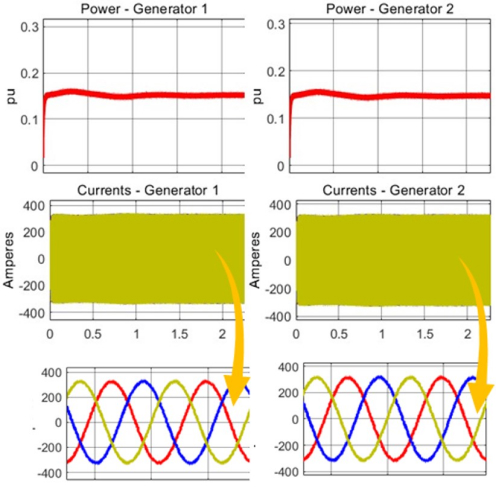
Fig 8. Generators’ Startup
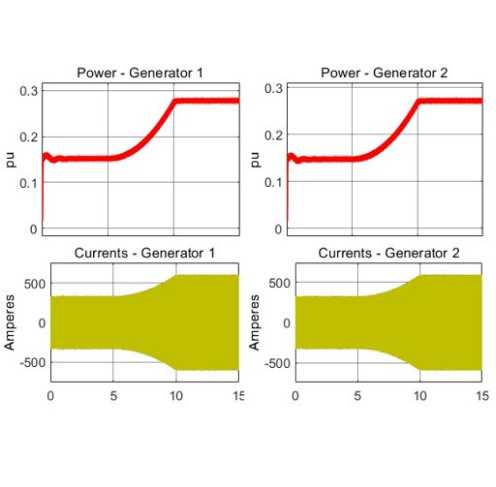
Fig 9. Generators’ Load Step Change
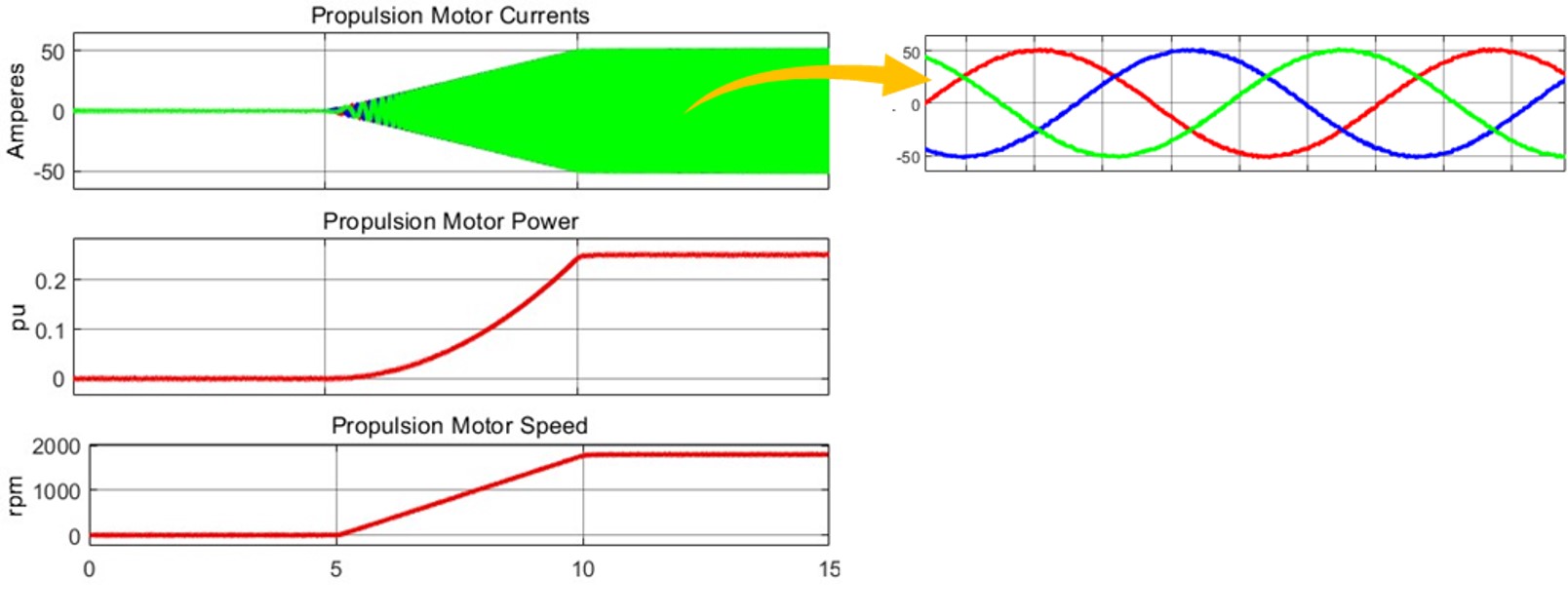
Fig 10. Propulsion Motor Response
Referenzen
-
Graham Dudgeon (2024). Shipboard Power System in Simscape (https://github.com/mathworks/Two-Zone-MVDC-Electric-Ship), GitHub. Retrieved April 17, 2024.
-
D. Park and M. Zadeh, "Dynamic Modeling, Stability Analysis, and Power Management of Shipboard DC Hybrid Power Systems," in IEEE Transactions on Transportation Electrification, vol. 8, no. 1, pp. 225-238, March 2022, doi: 10.1109/TTE.2021.3119231.