
海事电力系统
海洋电力推进系统为传统的推进方式提供了一种更加环保的替代方案。该系统使用电动机驱动螺旋桨,取代了传统的蒸汽机。通过利用来自发电机、电池或可再生能源(如太阳能和风能)的电能,海洋电力推进系统能够实现更加清洁且灵活的运行方式。
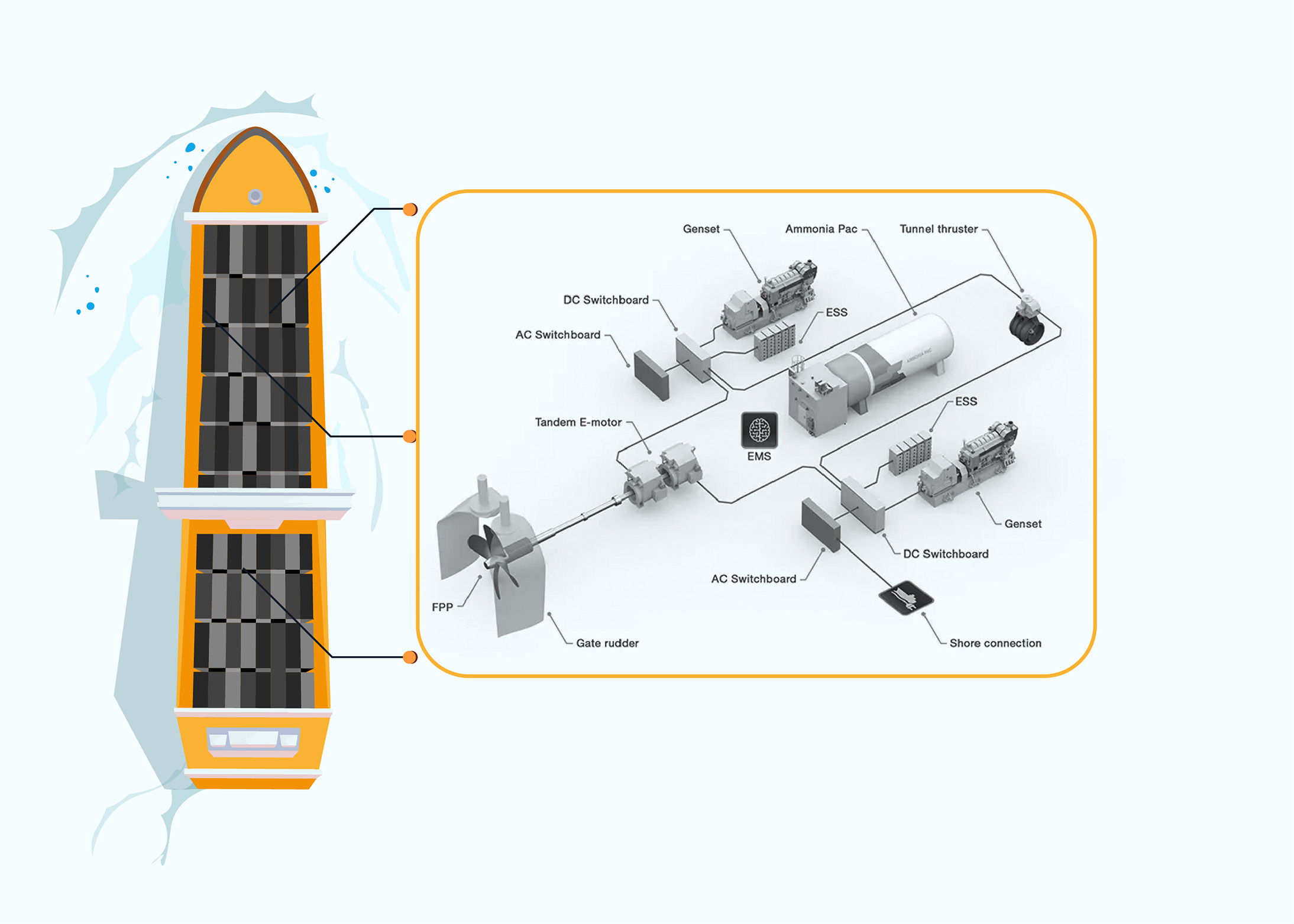
图 1. 海洋推进动力系统
图 1 所示为海洋推进动力系统。海洋电力推进的优势之一在于其具备减少碳排放的潜力。与燃烧化石燃料并向大气中排放污染物的传统发动机不同,电力推进系统在使用过程中几乎不产生排放。这使其成为船舶在降低环境影响、满足排放法规要求方面的一种可行替代方案。
除了具备环保优势外,海洋电力推进系统还以其更高的能源效率而闻名。电动机能够精确控制转速和功率,使船舶能够优化能源消耗。这不仅有助于节省燃料,还能降低船东的运营成本。此外,电力推进系统的灵活性使其能够实现混合动力配置,即多种电源可协同工作,从而最大化系统的效率与性能。
此外,海洋电力推进系统还具备减振等其他优势。与传统发动机相比,电动机运行更加平稳、安静,为船员和乘客提供了更加宁静、舒适的环境。这对于诸如渡轮等以乘客舒适度为首要考虑的船舶而言尤为重要。
因此,海洋电力推进动力系统通过提供更清洁、更高效的推进方式,有望彻底变革海事行业。未来,这些系统将在推动可持续海上运输的发展中发挥重要作用。 在本篇博客中,我们将探讨海洋动力系统的仿真过程,以及如何利用 Impedyme 的 CHP 在满功率条件下实现实时仿真。
为什么要进行海洋动力系统仿真?
海洋动力实时仿真对于在可控且高效的环境下测试和验证海洋推进系统的性能与安全性至关重要。通过构建模拟真实船舶运行条件的环境,我们可以仿真不同的场景和操作状态,而无需承担现场试验所带来的风险和成本。
在海洋动力系统中使用实时仿真的主要原因之一是评估系统在各种工况和负载下的行为与性能,包括正常运行状态以及潜在故障情况。这使我们能够测试不同的设计方案和控制策略,以确保系统即便在恶劣海况或功率需求突变等情况下,也能安全高效地运行。
实时仿真还为优化系统性能提供了宝贵的平台。通过对不同电源、储能方案及控制算法进行实验,我们能够确定海洋电力推进系统的有效配置,从而提高燃料效率、减少排放并降低运营成本。
实时仿真的另一大优势在于其能够支持可再生能源和先进技术在海洋动力系统中的整合。通过模拟太阳能、风能或其他可再生能源的影响,我们可以探索将传统动力与可再生能源结合的混合推进系统,从而实现更高的效率和可持续性。
因此,海洋动力实时仿真在推动高效海洋推进系统的发展中发挥着关键作用。它不仅能够进行全面的测试和优化,还为海事行业提供了更清洁、更高效的技术解决方案。
海洋动力系统的 Simulink 模型:
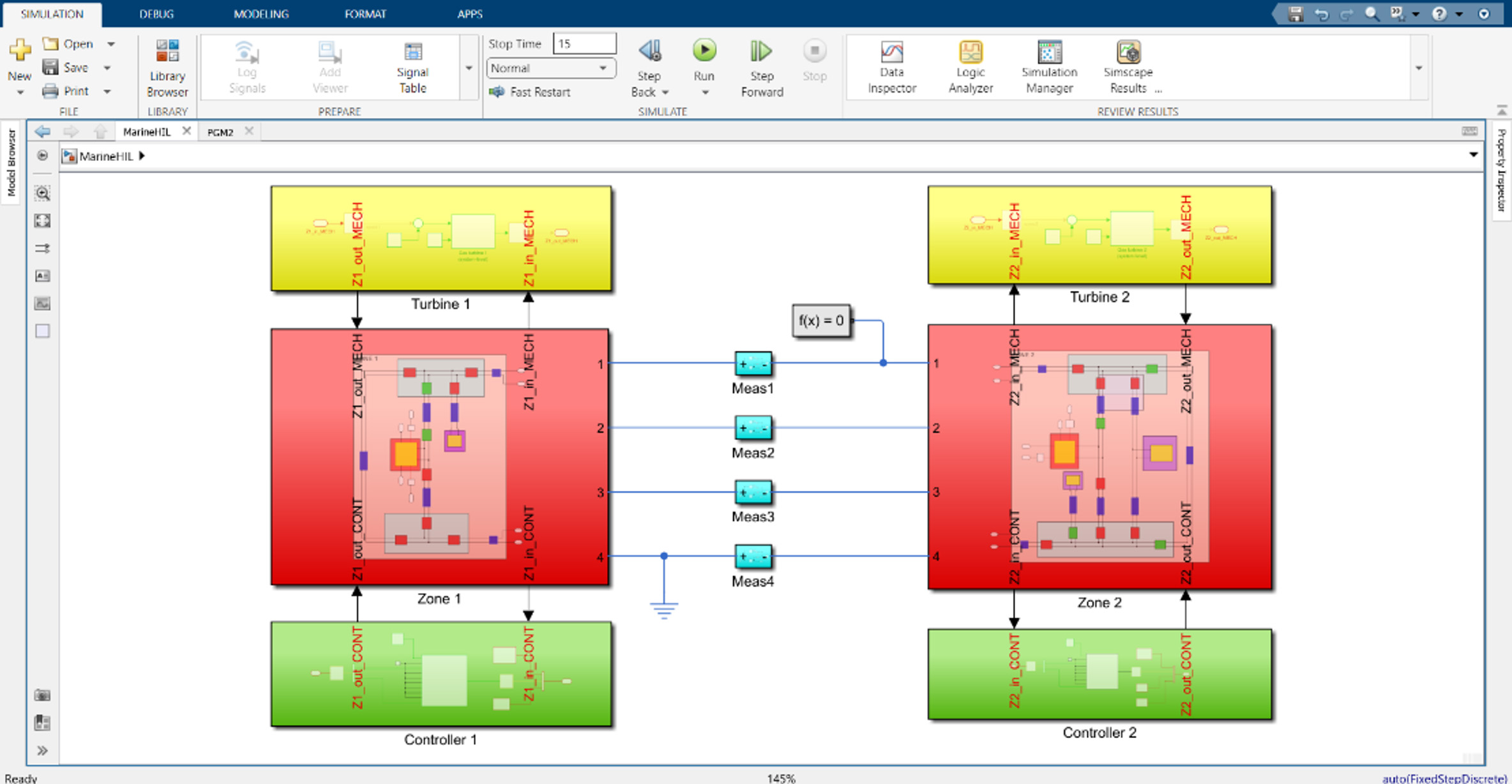
图 2. 海洋动力系统 Simulink 模型
该动力系统模型旨在重现现代海洋动力系统的运行行为与特性。模型包括同步发电机和 LC 滤波器,用于维持系统的电能质量和稳定性。此外,模型中还包含 30 个断路器和 20 个不同类型的负载,真实地反映了海洋环境中多样化的用电需求。模型中配备的两套电力推进装置和两路岸电源体现了其多功能性,可模拟船舶中不同的运行场景和电源组合。
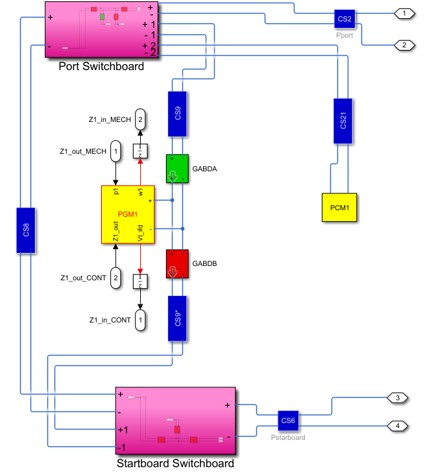
图 3. 区域 1 模型
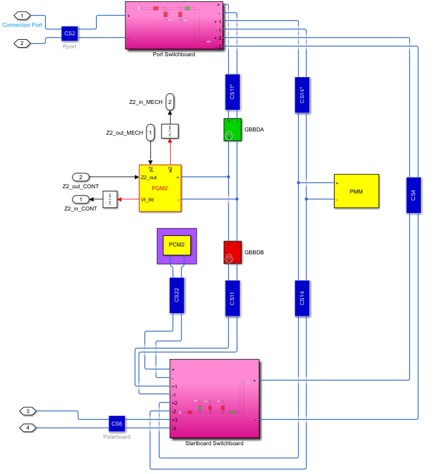
图 4. 区域 2 模型
船舶电力系统模型展示了船舶上电力的生成、分配和管理方式。在该模型中,船舶被划分为两个主要区域,每个区域配备发电机及约四个配电盘,用于管理整个船舶的电力分配。
海洋动力系统模型中区域 2 的推进电机被建模为具有磁场定向控制的永磁同步电机。该设计能够对船舶推进系统进行精确控制,确保在各种海洋环境下的航行和稳定性。
系统中的发电机(PG 单元)采用燃气轮机驱动的同步电机建模。这些电机配备调速器模型,用于调节发动机转速并保持稳定的功率输出。此外,还包括自动电压调节器和励磁机,以确保系统内电压水平的稳定,这对于船舶上各类电气设备的正常运行至关重要。
系统还采用了交流转直流(AC→DC)转换,使动力系统能够满足船舶上不同的电力需求。这种转换尤为必要,因为它允许在直流电压中引入下垂特性,从而有助于调节发电机之间的功率分配,确保每台发电机都能向整体电力供应贡献其应有的份额。
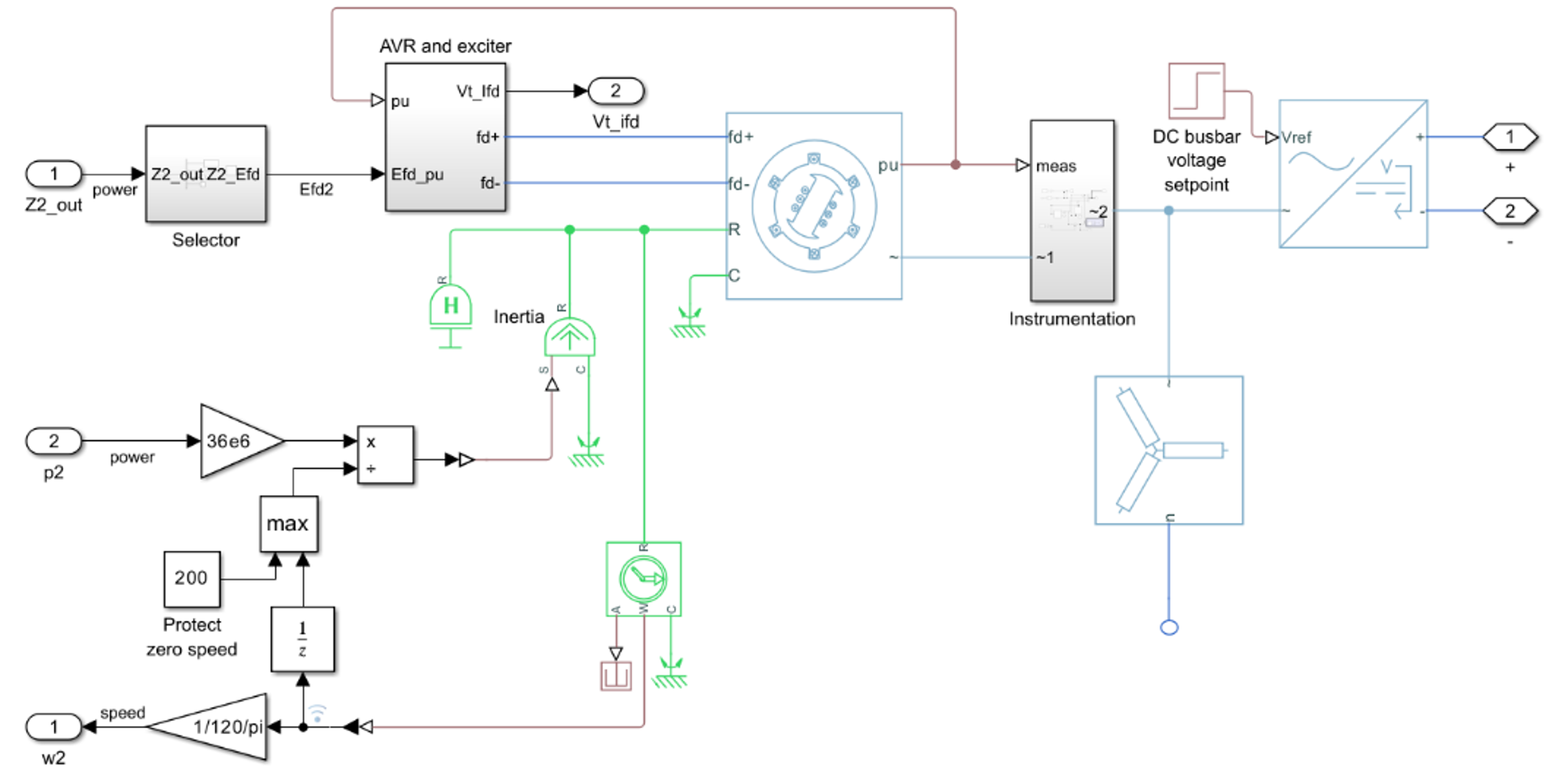
图 5. 发电机模型
通过平衡各发电机之间的功率分配,船舶电力系统能够高效且可靠地运行。这种控制水平对于维持船舶电力稳定性和优化性能至关重要,无论是用于推进、船上系统还是其他运营需求。既然海洋动力系统模型已通过 Simulink 构建完成,接下来让我们了解 Impedyme 的 CHP 技术,以便对所开发的模型进行实时仿真和测试。
Impedyme 的 CHP 技术:

图 6. Impedyme 的 CHP 机柜
CHP 技术将 用于硬件在环(HIL) 与 功率硬件在环(PHIL) 功能,在电动汽车(EV)开发中提供了无与伦比的精确性和效率。通过 CHP,工程师可以精确模拟真实工况,在动态条件下测试电动汽车的各类组件和系统。从电池管理系统到电机控制器,CHP 使制造商能够优化性能、提升可靠性,并加快电动汽车的上市周期。其模块化设计确保了对不断变化的测试需求具有高度适应性,而直观的 Simulink 界面则简化了测试流程。
Impedyme CHP 的部分功能特点包括:

Impedyme 的仿真解决方案能够模拟您的 MATLAB Simulink 模型,用于高功率测试,可达数兆瓦级,带宽可达 20 kHz。只需将光纤连接到我们的机柜并部署模型,即可开始测试。机柜配备多条光纤链路,每条链路速率可达 12.5 吉比特每秒。对于超低步长的仿真,该设备支持基于 FPGA 的测试,可实现低至纳秒级的时间步长。此外,由于 FPGA 的处理速度远高于 CPU,基于 FPGA 的实时仿真能够提供更优异的性能。
此外,对于高速仿真,机柜中各抽屉的 FPGA 可以相互通信。使用 Impedyme 的 CHP 进行测试非常简便,因为它直接支持 Simulink 设计。我们的产品配备了丰富的预设计模型,您可以根据自身需求和要求自定义这些设计。此外,如果我们同时对电力系统的输入端和输出端进行仿真,就可以实现功率循环流动。由于功率被循环利用,只需补充电网中的功率损耗即可。这样的技术能够显著降低实验室在测试大功率系统时的功率需求。 在模型实时仿真过程中,我们的集成热管理系统采用先进的液冷 + 风冷技术,无需额外制冷设备即可保证温控。因此,我们使用 Impedyme 的 CHP 对所开发的海洋动力系统模型进行实时仿真。
既然我们已经开发完成了整套动力系统模型,现在让我们看看如何进行连接以启动测试过程。
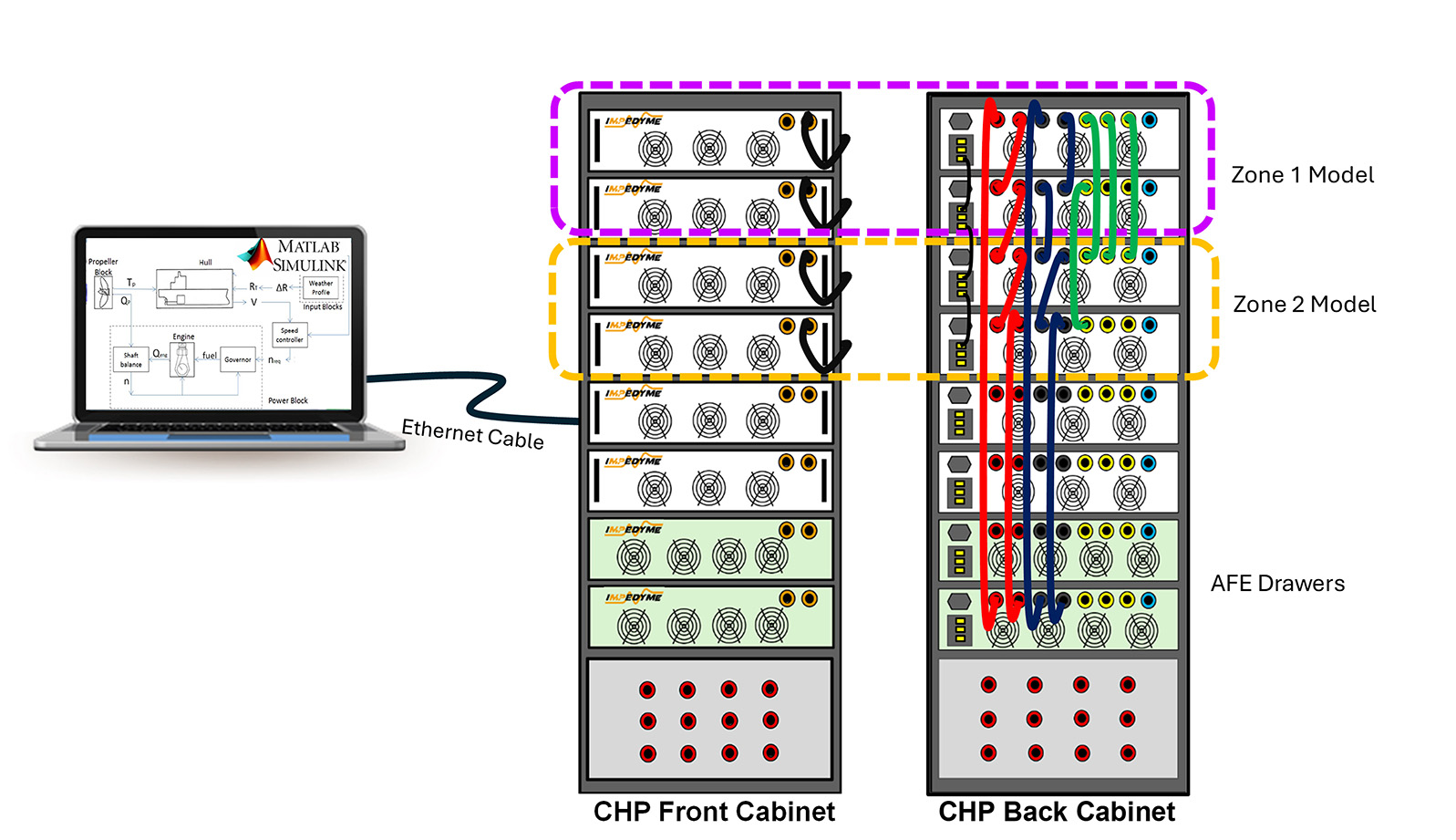
图 7. 海洋动力系统仿真:Impedyme CHP 连接示意图
我们将前两个抽屉(即最上方的两抽屉)分配给区域 1 模型,接下来的两个抽屉分配给区域 2 模型。最后两个抽屉(即最下方的两抽屉)专用于提供仿真直流耦合的有源前端(AFE)变流器。
现在,让我们来看如何进行连接以分配这些抽屉。电源连接位于机柜背面。有源前端抽屉提供的直流电源接入区域 1 抽屉,区域 1 的电压再与区域 2 的电压耦合。下方的抽屉仿真区域 2 的运行(包含推进电机模型)。最后,区域 2 的直流耦合电流返回到有源前端抽屉,实现功率循环流动。连接完成后,我们即可开始测试。
仿真结果:
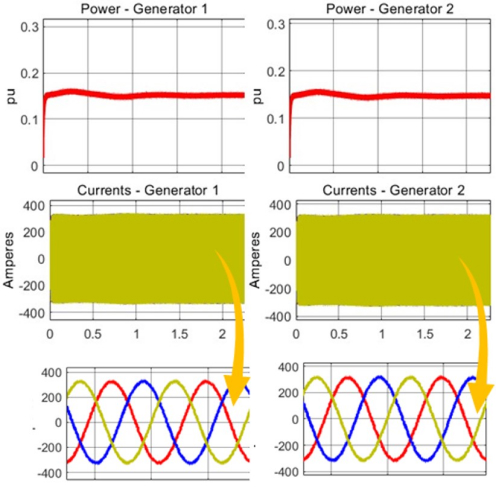
图 8. 发电机启动
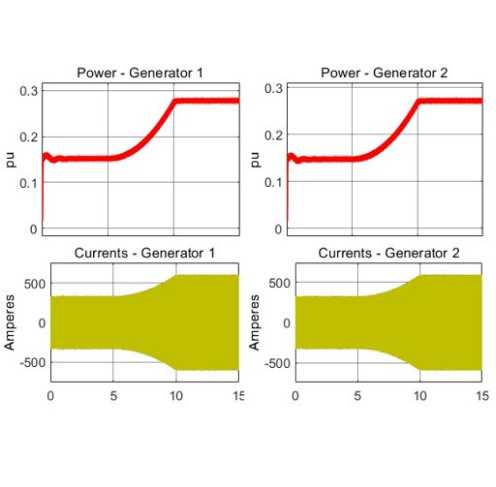
图 9. 发电机负载阶跃变化
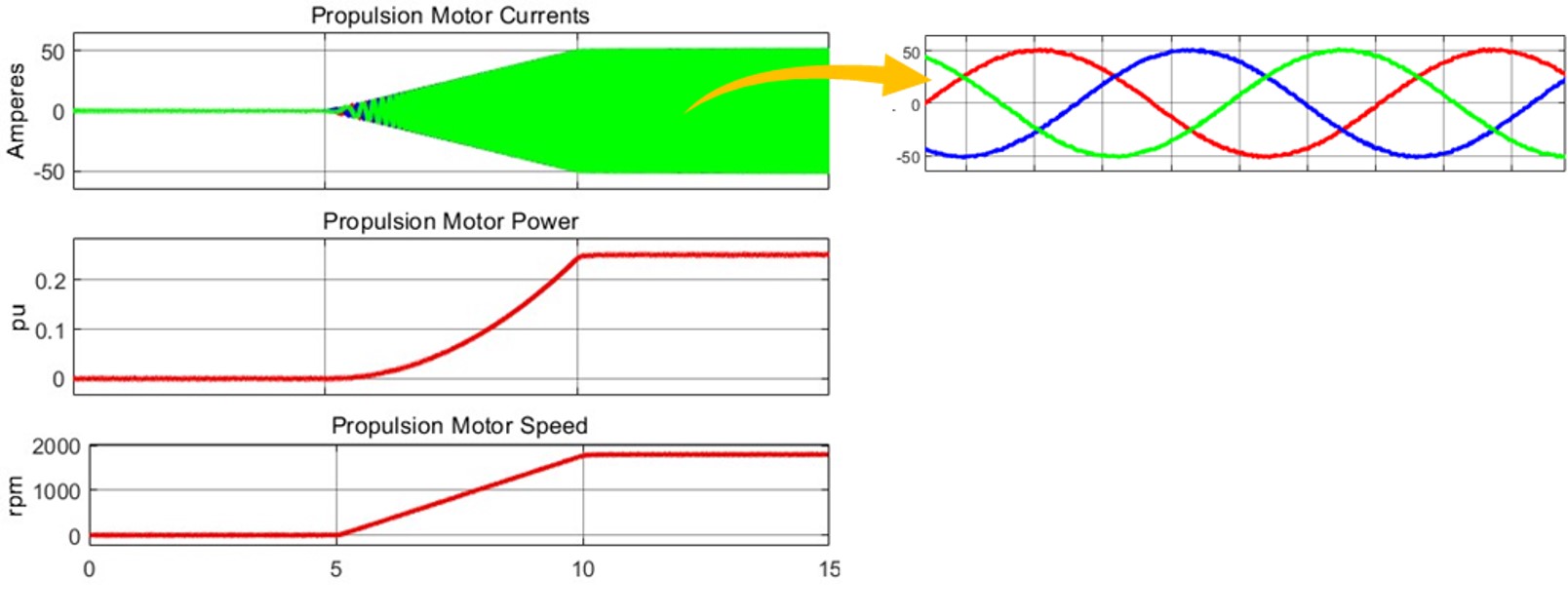
图 10. 推进电机响应
参考文献
-
Graham Dudgeon (2024)。Simscape 中的船舶电力系统https://github.com/mathworks/Two-Zone-MVDC-Electric-Ship), GitHub. Retrieved April 17, 2024.
-
D. Park 和 M. Zadeh, 《船舶直流混合动力系统的动态建模、稳定性分析及功率管理》,发表于 IEEE Transactions on Transportation Electrification, 第 8 卷,第 1 期,页 225-238,2022 年 3 月,doi: 10.1109/TTE.2021.3119231。