
Next Generation Electric Aircraft Systems Powered By HIL and Real-Time Simulation
Elektrische Flugzeugsysteme verändern die Luftfahrt, indem sie sauberere und effizientere Betriebsweisen ermöglichen. Im Zentrum dieser Entwicklung stehen Hardware-in-the-Loop (HIL)- und Echtzeitsimulationstechnologien, die es erlauben, Antriebs- und Energiemanagementsysteme unter realitätsnahen Bedingungen frühzeitig im Entwicklungsprozess und im vollen Leistungsmaßstab zu validieren.
Diese Systeme nutzen elektrische Antriebstechnologien, die im Vergleich zu herkömmlichen, fossil betriebenen Flugzeugen effizienter und umweltfreundlicher sind. Mit der steigenden Nachfrage nach saubereren und leiseren Transportlösungen haben elektrische Flugzeuge und Lufttaxis das Potenzial, die Art und Weise des Reisens grundlegend zu verändern. Elektrische Flugzeuge verwenden Elektromotoren, die durch Batterien oder andere Energiespeichersysteme betrieben werden. Dadurch entfällt der Einsatz konventioneller Verbrennungsmotoren und die CO₂-Emissionen werden erheblich reduziert. Zudem arbeiten elektrische Antriebe deutlich leiser, was zur Verringerung der Lärmbelastung in Flughafenumgebungen und urbanen Gebieten beiträgt.
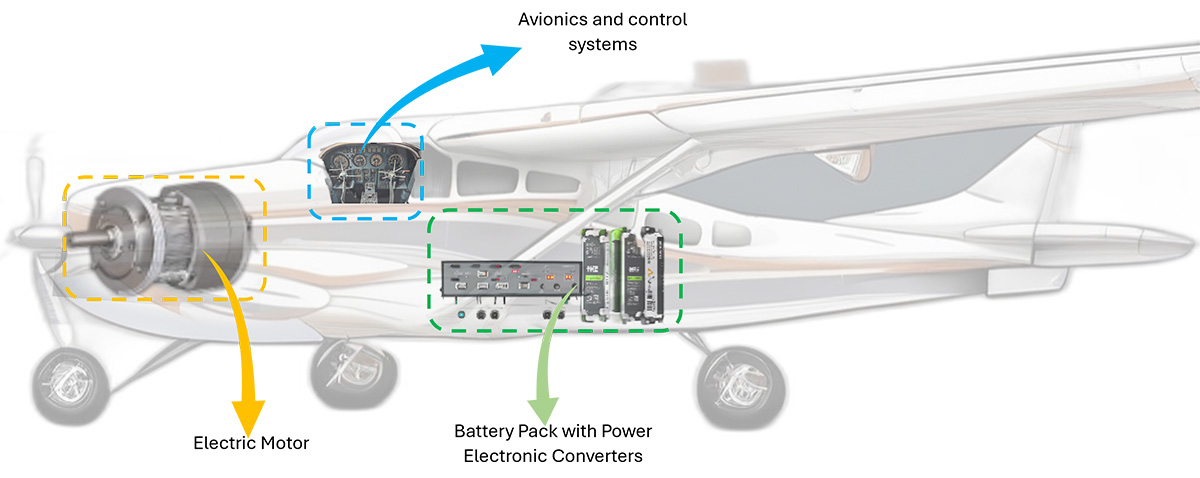
Fig 1. Electric Aircraft
Lufttaxis stellen eine neue Form der urbanen Luftmobilität dar und ermöglichen bedarfsgesteuerte, direkte Flugverbindungen über kurze Distanzen innerhalb von Städten oder zwischen nahegelegenen Regionen. Diese Systeme basieren in der Regel auf elektrischer Senkrechtstart- und -landetechnologie (eVTOL), wodurch sie von kleinen Landeplätzen statt von klassischen Start- und Landebahnen operieren können. Diese Flexibilität eröffnet neue Möglichkeiten für den Transport, da schnellere und komfortablere Reisemöglichkeiten für Passagiere geschaffen werden.
Eine der Herausforderungen elektrischer Flugzeug- und Lufttaxisysteme liegt in der begrenzten Energiedichte aktueller Batterietechnologien. Dies schränkt Reichweite und Flugdauer ein und macht elektrische Flugzeuge derzeit eher für Kurzstreckenflüge geeignet als für Langstrecken. Fortschritte in der Batterieforschung und -entwicklung tragen jedoch dazu bei, diese Einschränkungen zu überwinden, sodass zukünftige Technologien längere Flugstrecken ermöglichen könnten.
Ein weiterer wichtiger Aspekt ist das Potenzial zur Verbesserung der Sicherheit. Elektrische Antriebssysteme verfügen über weniger bewegliche Teile als herkömmliche Triebwerke, wodurch Wartungsaufwand und Ausfallrisiken reduziert werden können.
Regulierungsbehörden weltweit arbeiten daran, Standards und Vorschriften für elektrische Flugzeuge und Lufttaxis zu etablieren. Diese Maßnahmen sind entscheidend, um Sicherheit und Zuverlässigkeit dieser neuen Transportformen zu gewährleisten. Mit dem Wachstum der Branche werden diese Regularien eine zentrale Rolle bei der Gestaltung der Zukunft der elektrischen Luftfahrt spielen.
Auch die öffentliche Akzeptanz und der Ausbau der Infrastruktur sind entscheidende Faktoren für den Erfolg von Lufttaxisystemen.
Die Aufklärung der Bevölkerung über die Vorteile elektrischer Luftfahrt sowie die Berücksichtigung möglicher Bedenken sind essenziell, um breite Unterstützung zu gewinnen. Ebenso ist der Aufbau geeigneter Infrastruktur, beispielsweise von Ladeeinrichtungen, eine Voraussetzung für die großflächige Einführung solcher Systeme.
Warum Echtzeit-Emulation für elektrische Flugzeuge?
Bei Impedyme sind unsere Echtzeit-HIL- und PHIL -Testlösungen darauf ausgelegt, die Entwicklung elektrischer Flugzeuge zu beschleunigen, indem sie skalierbare und modulare Plattformen bereitstellen, die sich nahtlos in MATLAB/Simulink integrieren lassen. Diese Systeme ermöglichen es Ingenieuren, Flugdynamik und Leistungsanforderungen mit hoher Genauigkeit und Sicherheit zu emulieren. Da sich die Branche zunehmend in Richtung elektrischer Antriebe entwickelt, tragen diese Testmethoden dazu bei, Sicherheit, Zuverlässigkeit und Effizienz neuer Technologien sicherzustellen, bevor sie in reale Flugzeuge integriert werden. Ein wesentlicher Vorteil der Echtzeit-Emulation liegt in der Möglichkeit, komplexe und dynamische Betriebsbedingungen zu simulieren. Elektrische Flugzeugsysteme – einschließlich Antrieb, Energiespeicherung und Steuerung – müssen in unterschiedlichen Szenarien nahtlos zusammenarbeiten. Durch die Echtzeit-Emulation verschiedener Flugzustände und Leistungsanforderungen bei vollem Leistungsfluss kann das System umfassend getestet und potenzielle Probleme frühzeitig erkannt werden.
Echtzeit-Emulationstests ermöglichen zudem die Integration realer Hardwarekomponenten in eine simulierte Umgebung, wodurch eine realitätsnahe Testplattform entsteht. Dieser Ansatz erlaubt die Bewertung des Verhaltens realer Komponenten wie Elektromotoren und Batterien unter simulierten Flugbedingungen und ist entscheidend für die Verifizierung von Leistung und Sicherheit in einer kontrollierten Umgebung.
Ein weiterer Vorteil ist die Validierung von Regelalgorithmen. Elektrische Flugzeuge sind stark auf Steuerungssysteme angewiesen, um Energieverteilung, Antrieb und andere kritische Funktionen zu koordinieren. Durch Echtzeittests dieser Systeme kann sichergestellt werden, dass sie unter wechselnden Flugbedingungen korrekt und effizient arbeiten. Darüber hinaus ermöglicht die Echtzeit-Emulation schnelle Iterationen und Optimierungen von Systemdesigns. Komponenten und Regelalgorithmen können auf Basis von Testergebnissen zügig angepasst werden, was kürzere Entwicklungszyklen und verbesserte Systemleistung zur Folge hat. Dieser iterative Ansatz ist entscheidend für die Weiterentwicklung elektrischer Flugzeugtechnologien und für die Wettbewerbsfähigkeit in der Branche.
Nicht zuletzt basiert die Echtzeit-Emulation in der Regel auf Simulationsmodellen, die den Testprozess vergleichsweise einfach und intuitiv gestaltbar machen.
Simulink-Modell eines elektrischen Flugzeugs
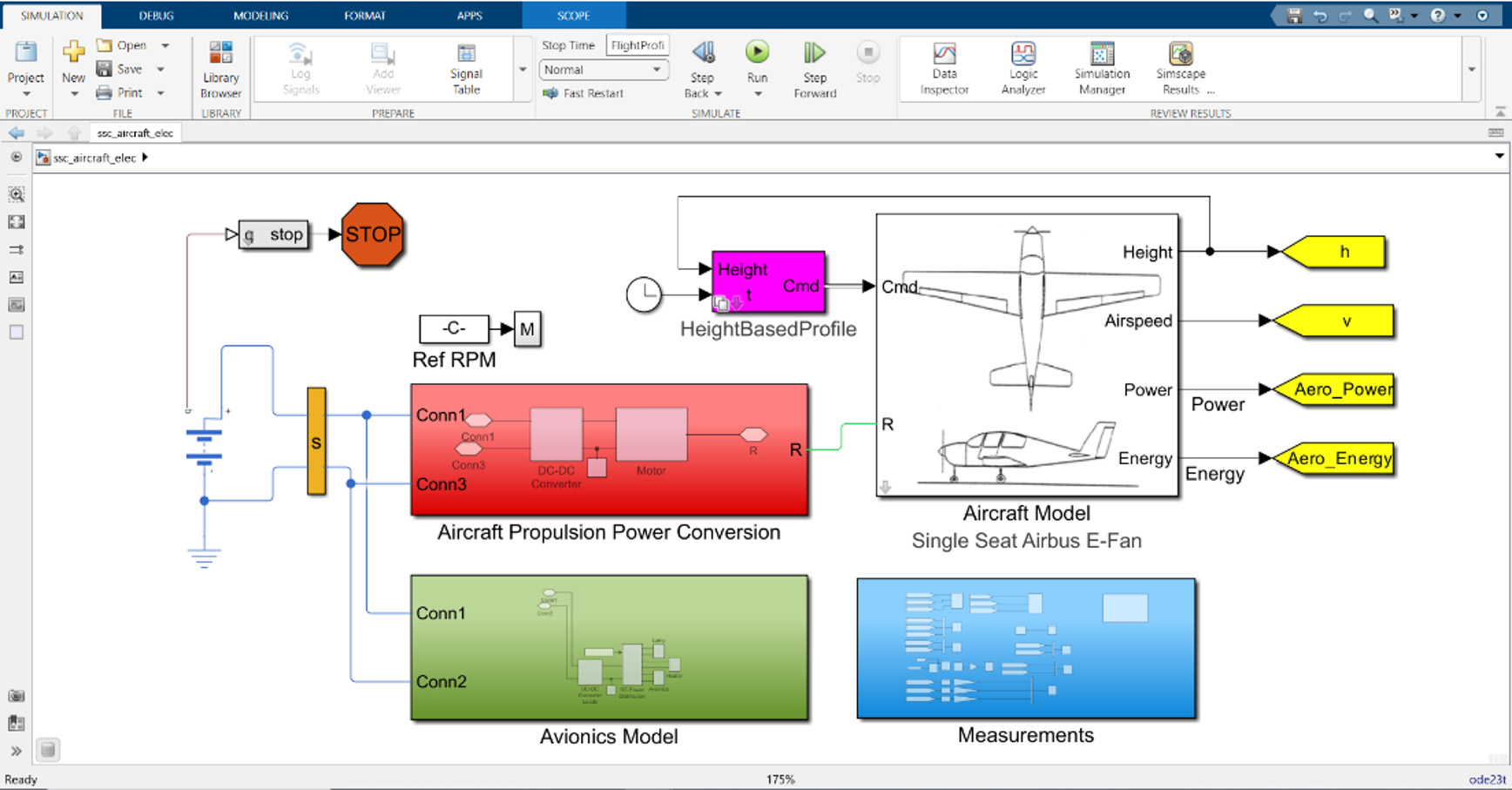
Fig 2. Electric Aircraft System’s Simulink Model
Das Simulink-Modell wird nicht nur für den konzeptionellen Entwurf verwendet – es kann auch direkt auf die CHP-Plattform von Impedyme für Echtzeitausführung und Tests deployt werden. Dieses Modell umfasst die Subsysteme Antrieb, Dynamik und Avionik, die jeweils für Validierungen auf Hardwareebene vorbereitet sind.

Fig 3. Electric Aircraft Propulsion Model
Das Antriebsmodell des Flugzeugs besteht aus einem DC/DC-Wandler, der mit einem permanentmagneterregten Synchronmotor (PMSM) verbunden ist. Der PMSM liefert das Drehmoment für die elektrischen Propeller und ermöglicht so die Steuerung und Geschwindigkeitsregelung des Flugzeugs. Der Motor arbeitet im Drehmomentregelungsmodus, wobei Drehzahlregler mit proportionalen (Kp) und integralen (Ki) Verstärkungen zur Steuerung eingesetzt werden.
Das dynamische Flugmodell simuliert die Flugeigenschaften des Flugzeugs unter verschiedenen Auslegungskriterien wie Reichweite und Flugdauer. Durch Anpassung verschiedener Parameter kann das Modell für unterschiedliche Designanalysen genutzt werden. Innerhalb dieses Modells befinden sich weitere Subsysteme wie der Schubvorgabeblock und der Längsdynamikblock.
Der Schubvorgabeblock ermöglicht die Definition der gewünschten Schubwerte für die Propeller, wodurch Geschwindigkeit und Beschleunigung direkt beeinflusst werden. Durch Variation der Schubvorgaben können unterschiedliche Flugszenarien simuliert und das Systemverhalten analysiert werden.
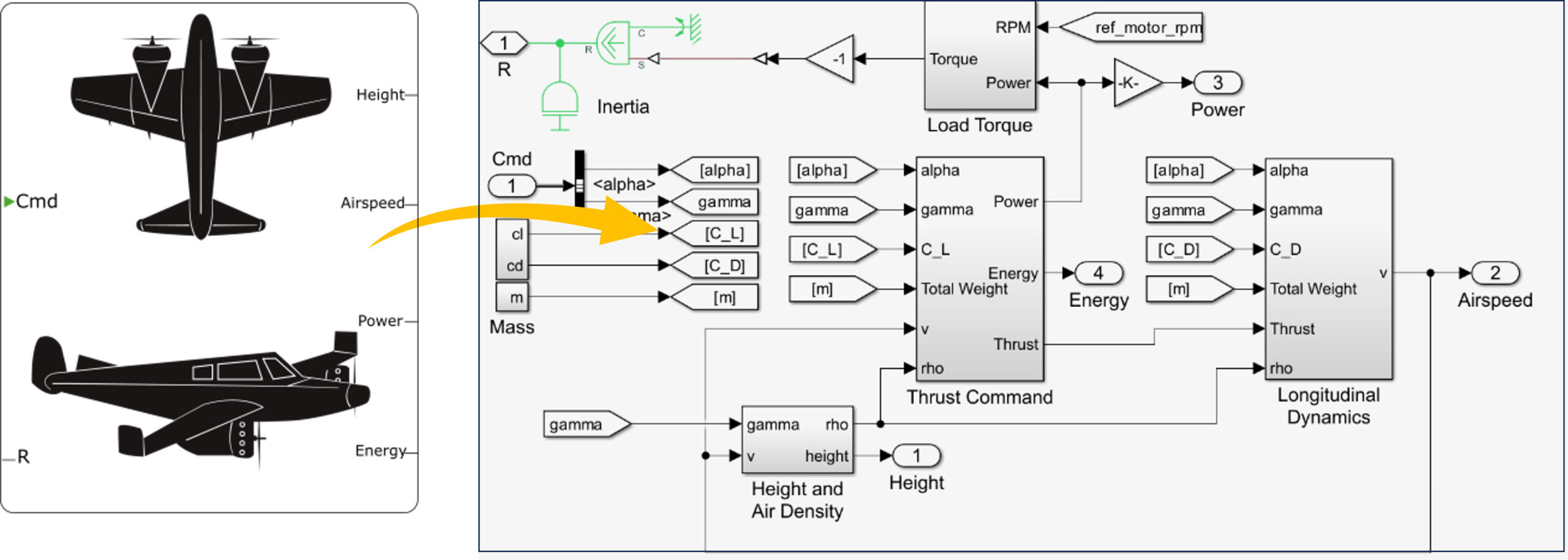
Fig 4. Electric Aircraft Dynamics’ Model
Der Längsdynamikblock beschreibt die Bewegung des Flugzeugs entlang der Längsachse, einschließlich Nickbewegungen (Auf- und Abbewegung) sowie Auftriebseigenschaften. Dieser Block ist entscheidend für die Analyse des Flugverhaltens in verschiedenen Flugphasen wie Start, Landung und Reiseflug.
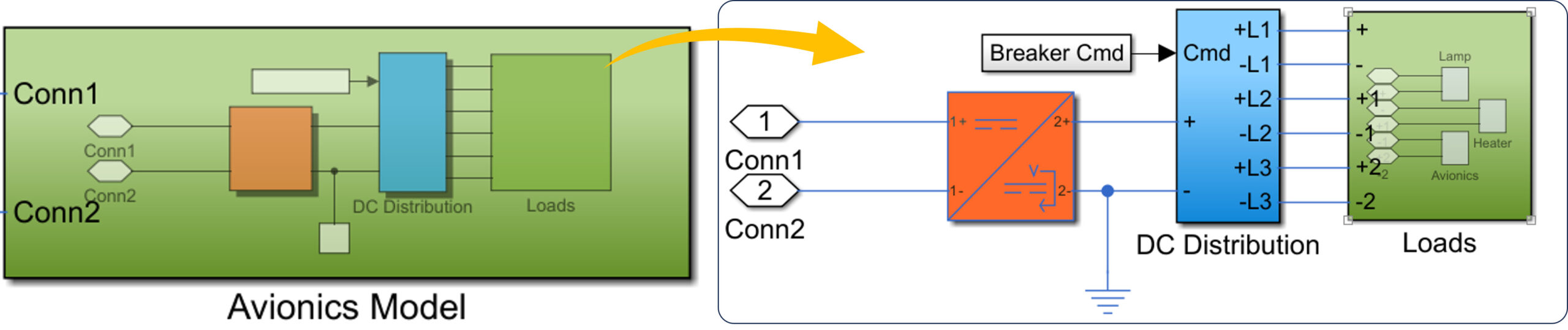
Fig 5. Electric Aircraft Avionics Model
Abschließend übernimmt das Avionikmodell die Energieverteilung sowie die Versorgung kleiner Gleichstromlasten im elektrischen Flugzeug. Es beinhaltet einen Leistungswandler, der die Batteriespannung reduziert und über ein DC-Verteilungssystem verschiedene Verbraucher wie Beleuchtung und Heizsysteme versorgt. Dadurch wird sichergestellt, dass alle elektrischen Systeme an Bord effizient und zuverlässig arbeiten.
Nachdem die Modelle der elektrischen Flugzeugsysteme in Simulink erstellt wurden, betrachten wir nun die CHP-Technologie von Impedyme zur Echtzeit-Emulation und -Validierung dieser Modelle.
Impedyme’s CHP Technology

Fig 6. Impedyme’s CHP Cabinet
Die CHP-Plattform von Impedyme eignet sich besonders für die Validierung elektrischer Flugzeugsysteme. Von hochfrequenten Antrieben bis hin zur Integration von Batteriesystemen ermöglicht CHP Ingenieuren, komplexe Systeme in Echtzeit und unter Volllast-Flugbedingungen zu testen. Von Batteriemanagementsystemen bis hin zu vollständigen elektrischen Flugzeugen unterstützt CHP Hersteller dabei, Leistung zu optimieren, Zuverlässigkeit zu erhöhen und die Markteinführungszeit zu verkürzen. Das modulare Design bietet Flexibilität für sich wandelnde Testanforderungen, während die intuitive Simulink-Oberfläche den Testprozess vereinfacht.
Zu den Merkmalen von Impedymes CHP gehören:

Die Emulationslösungen von Impedyme bilden MATLAB-Simulink-Modelle für Hochleistungstests im Multi-Megawatt-Bereich bei Bandbreiten bis zu 20 kHz nach. Über optische Verbindungen werden die Modelle auf die Cabinets übertragen und direkt für Tests bereitgestellt. Jedes Cabinet verfügt über mehrere optische Links mit Datenraten von bis zu 12,5 Gbit/s.
Für Simulationen mit extrem kurzen Zeitschritten unterstützt das System FPGA-basierte Tests mit Zeitschritten im Nanosekundenbereich. Aufgrund der deutlich höheren Verarbeitungsgeschwindigkeit eines FPGA im Vergleich zu einer CPU wird eine verbesserte Echtzeit-Performance erreicht. Für Hochgeschwindigkeitsemulationen können die einzelnen FPGAs innerhalb der Einschübe miteinander kommunizieren. Die Tests erfolgen direkt auf Basis von Simulink-Designs. Zudem stehen zahlreiche vorgefertigte Modelle zur Verfügung, die an spezifische Anforderungen angepasst werden können. Bei gleichzeitiger Emulation von Ein- und Ausgangsseite eines Leistungssystems kann ein zirkulierender Leistungsfluss realisiert werden. Da die Leistung intern rezirkuliert wird, muss lediglich die Verlustleistung aus dem Netz eingespeist werden. Dadurch lassen sich die Leistungsanforderungen des Labors bei Tests großer Leistungssysteme erheblich reduzieren.
Now that we have developed the aircraft model, let us see how the connections are given to kickstart the testing process.
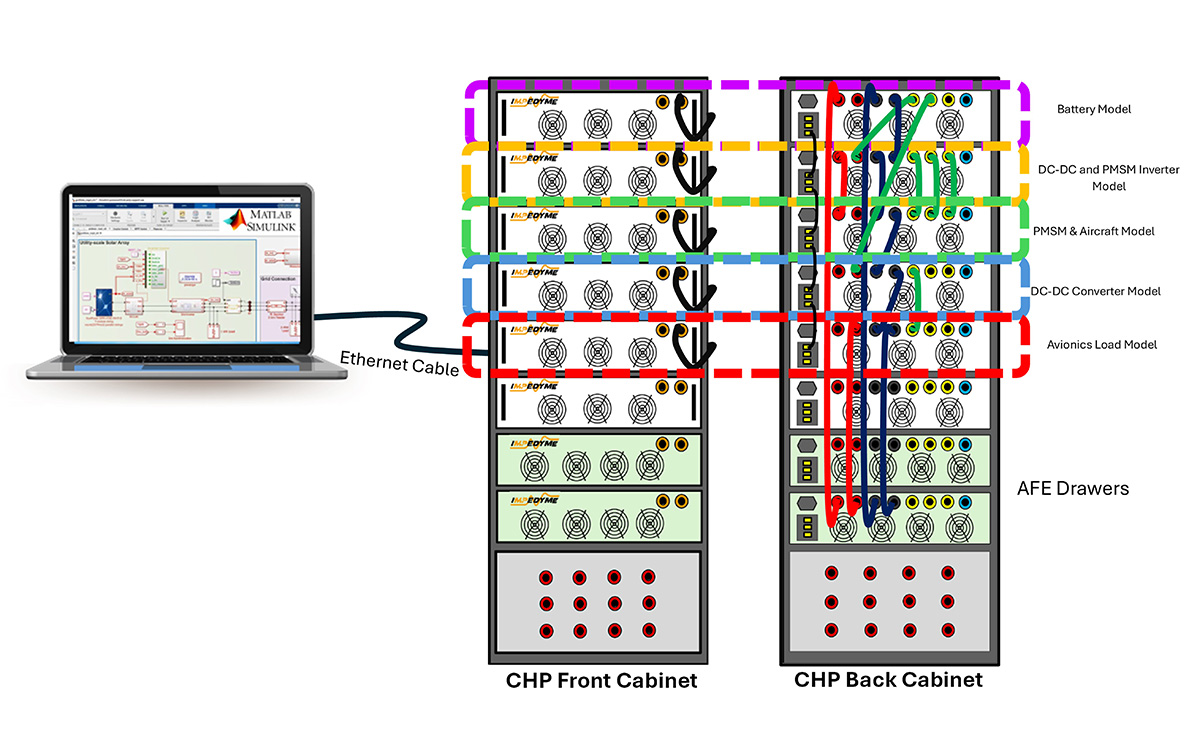
Fig 7. Electric Aircraft Power Systems Emulation: Impedyme’s CHP Connection Diagram
Der erste Einschub (oberster Einschub) wird dem Batteriemodell zugewiesen, der zweite Einschub dem DC/DC- und Wechselrichtermodell des PMSM. Der dritte Einschub ist dem PMSM-Motormodell des Flugzeugs gewidmet. Die beiden folgenden Einschübe werden jeweils für den DC/DC-Wandler und das Avionik-Lastmodell verwendet. Die beiden untersten Einschübe sind für die Active-Front-End-Konverter vorgesehen, die die DC-Kopplung für die Emulation bereitstellen.
Nun betrachten wir die Verschaltung dieser Einschübe. Die Leistungsanschlüsse befinden sich auf der Rückseite der Schaltschränke. Die DC-Versorgung aus dem Active-Front-End-Einschub wird dem Batteriemodell zugeführt, während die Batteriespannung dem Eingang des DC/DC- und Wechselrichtermodells bereitgestellt wird. Der zweite Einschub emuliert die Funktion eines DC/DC-Wandlers und Wechselrichters, indem er die Gleichspannung der Batterie in dreiphasige Wechselspannung umwandelt, die anschließend dem darunterliegenden Motor-Einschub zugeführt wird. Gleichzeitig wird die Gleichspannung der Batterie durch den DC/DC-Wandler-Einschub heruntergesetzt und dem darunterliegenden Avionik-Lastmodell bereitgestellt.
Die DC-Kopplung wird schließlich vom Avionik-Lastmodell zurück zum Active-Front-End-Einschub geführt, um einen zirkulierenden Leistungsfluss zu ermöglichen. Nachdem alle Verbindungen hergestellt sind, ist das System bereit für den Testbetrieb. Diese modulare Zuordnung bildet nicht nur die physische Systemarchitektur des Flugzeugs nach, sondern ermöglicht auch gezielte Fehlerinjektionen sowie die Optimierung einzelner Subsysteme. Durch die Schließung des Leistungsflusses über die Active-Front-End-Einschübe können zudem Energieeffizienz und thermisches Verhalten präzise emuliert werden.
Emulationsergebnisse
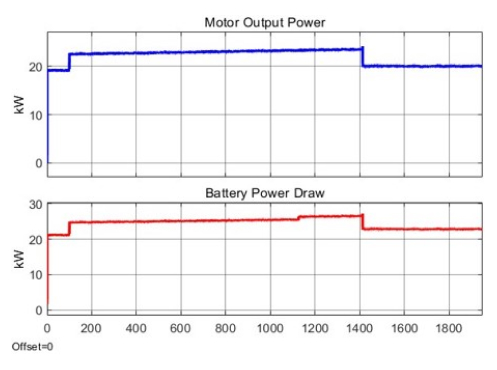
Fig 8. Motor and Battery Response of the Emulation
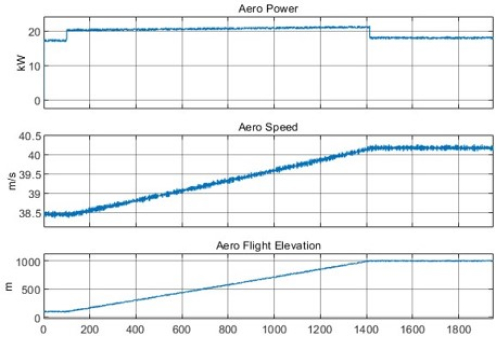
Fig 10. Aircraft Dynamics
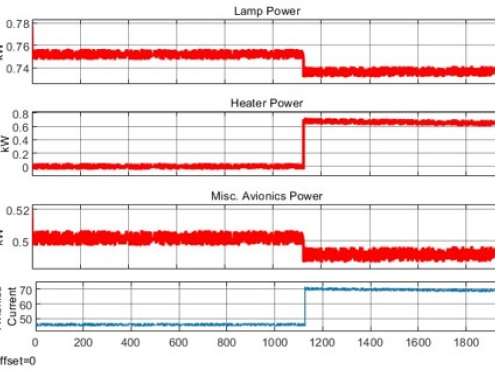
Fig 9. Emulation Response of Avionics Loads
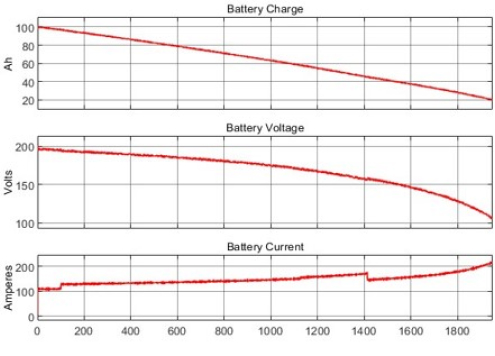
Fig 11. Battery Dynamics
Referenzen
- Zhao Wang, Steve Miller (2018). Electric Aircraft Model in Simscape (https://www.mathworks.com/matlabcentral/fileexchange/64991), MATLAB Central File Exchange. Retrieved November 14, 2018.
- 225-238, March 2022, doi: 10.1109/TTE.2021.3119231.