
下一代电动航空器系统:由硬件在环 (HIL) 与实时仿真驱动
电动航空器系统正通过实现更清洁、更高效的运行方式,推动航空业的变革。推动这一进步的核心技术是硬件在环(HIL)与实时仿真技术,它们能够在开发早期乃至全规模阶段,在接近真实环境的条件下,对推进与能量管理系统进行验证。
这些系统采用电力推进技术,与传统的化石燃料动力航空器相比,其效率更高且更加环保。随着人们对更清洁、更安静交通方式的需求不断增长,电动航空器和空中出租车正蓄势改变我们的出行方式。
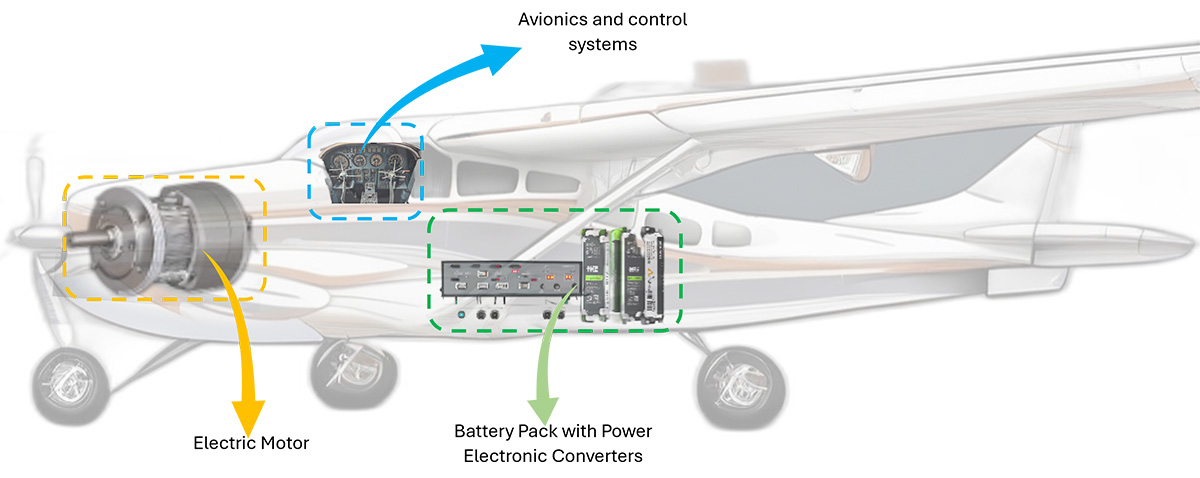
图 1. 电动航空器
电动航空器采用由电池或其他能量储存系统驱动的电动机,从而无需传统的内燃发动机,并可减少向大气中排放的碳排放量。与传统发动机相比,电力推进系统的噪声更低,有助于降低机场及城市区域的噪声污染。
空中出租车有望成为一种新的城市空中出行方式,可在城市内部或邻近区域之间提供按需、直达的短途航空出行服务。这类系统通常采用电动垂直起降(eVTOL)技术,使其能够从小型起降坪起降,而无需依赖传统跑道。这种灵活性为交通运输带来了新的可能性,为乘客提供更快捷、更便捷的出行选择。
电动航空出租系统面临的主要挑战之一是当前电池技术的能量密度有限——这限制了电动航空器的航程和续航能力,使其更适合执行短途飞行任务,而非长距离航行。然而,电池技术的持续研发正逐步解决这些问题,未来的技术进步有望使电动航空器实现更远距离的飞行。
电动航空出租系统的另一个重要方面在于其提升安全性的潜力。电力推进系统相比传统发动机具有更少的运动部件,这不仅可降低维护需求,还能减少机械故障的风险。
全球各地的监管机构正致力于制定电动航空器和空中出租系统的标准与法规。这些努力对于确保新型交通方式的安全性与可靠性至关重要。随着行业的不断发展,这些法规将在塑造电动航空未来格局中发挥关键作用。
公众接受度和基础设施建设是影响空中出租系统成功的其他关键因素。向公众普及电动航空的优势并解决他们可能存在的疑虑,对于获得支持至关重要。同样,建设充电站等基础设施,对于推动空中出租车的广泛应用也具有关键意义。
为什么选择电动航空器实时仿真?
在 Impedyme,我们的实时 HIL 与 PHIL 测试解决方案旨在通过提供可扩展、模块化的平台并与 MATLAB/Simulink 无缝集成,加速电动航空器的开发。这些系统使工程师能够以高精度和高安全性模拟飞行动力学和功率需求。随着行业向电力推进转型,这些测试方法有助于在新技术应用于实际航空器之前,确保其安全性、可靠性与效率。 进行实时仿真的一个关键原因是能够模拟复杂且动态的运行条件。电动航空器系统,包括推进系统、能量存储系统和控制组件,必须在各种场景中无缝协同工作。通过实时模拟不同的飞行条件和功率需求,并实现完整功率流仿真,我们可以全面测试系统的性能,并识别在实际飞行中可能出现的潜在问题。
实时仿真测试 允许将实际硬件组件与仿真环境相结合,从而提供更精确、更具代表性的测试平台。这种方法使我们能够在模拟飞行条件下评估实际组件(如电动机和电池)的性能表现。该测试对于在受控环境中验证硬件的性能与安全性至关重要。
实时仿真的另一个优势在于能够验证控制算法。电动航空器高度依赖控制系统来管理能量分配、推进系统以及其他关键功能。通过对这些控制系统进行实时测试,我们可以确保其在飞行过程中对变化的条件作出正确且高效的响应。实时仿真还便于系统设计的快速迭代与优化。它使我们能够根据测试结果迅速修改组件或控制算法,从而加快开发周期并提升系统性能。这一迭代过程对于电动航空器技术的发展及在行业中保持竞争力至关重要。
最后但同样重要的是,实时仿真通常使用仿真模型来执行测试过程,这种模型的构建相对简单且直观。
电动航空器的 Simulink 模型
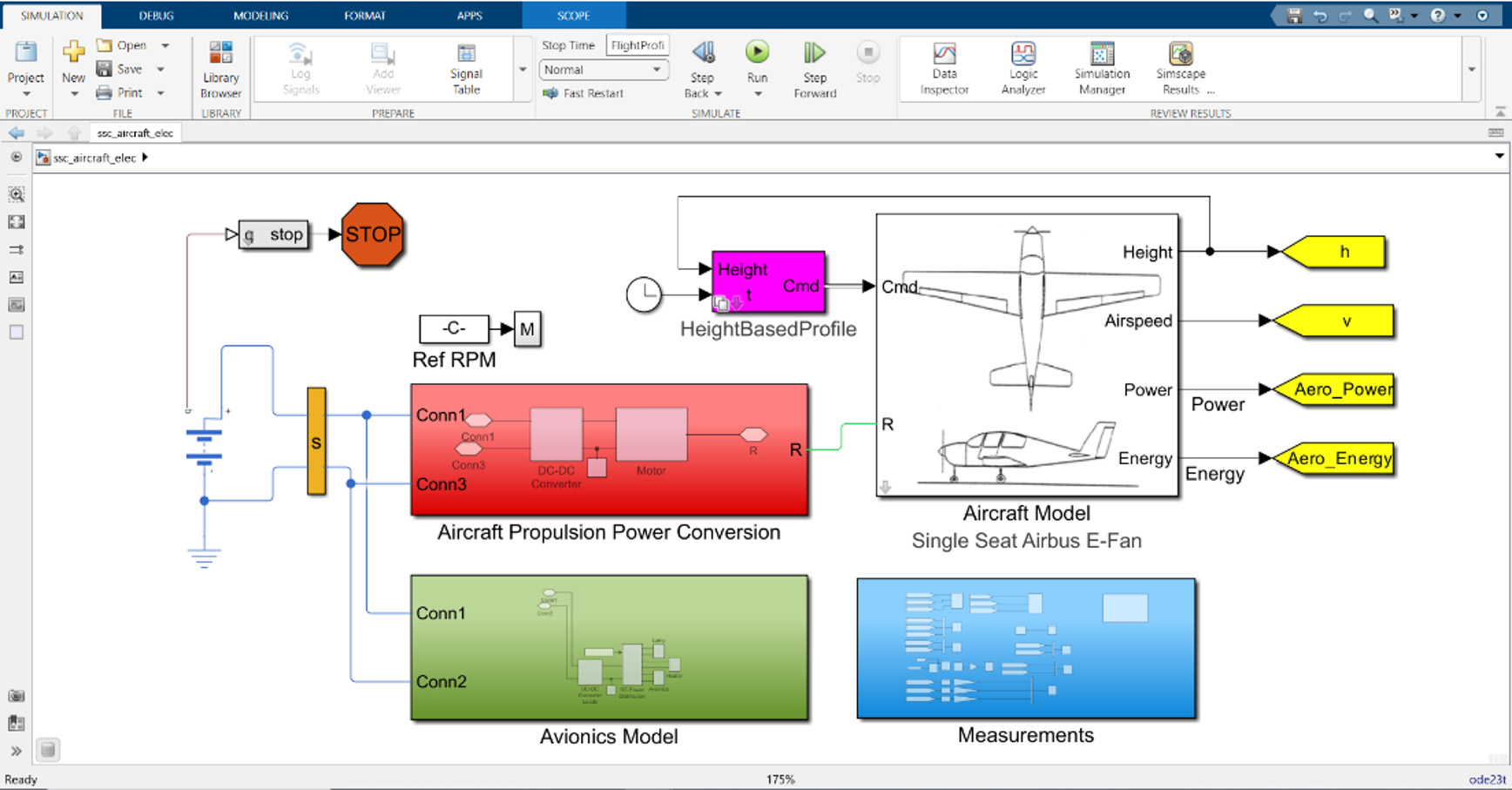
图 2. 电动航空器系统的 Simulink 模型
该 Simulink 模型不仅可用于概念设计,还可以直接部署到 Impedyme 的 CHP 平台上进行实时执行与测试。该模型涵盖推进、动力学及航空电子子系统——每个子系统均可进行硬件级验证。

图 3. 电动航空器推进系统模型
该航空器推进系统模型由一个 DC-DC 转换器与永磁同步电机(PMSM)相连接组成。PMSM 向电动飞行螺旋桨提供扭矩,使航空器能够进行机动并维持速度。该电机以扭矩控制模式运行,速度控制器通过比例(Kp)和积分(Ki)增益值对电机运行进行控制。
航空器动力学模型用于模拟航空器在不同设计指标下的飞行特性,例如飞行航程和持续时间。通过调整各种参数,该模型可以定制以测试不同的设计方面。在该模型中,还包含其他子模块,如推力指令模块和纵向动力学模块。
推力指令模块允许用户为航空器螺旋桨设定所需的推力水平,这将直接影响航空器的速度和加速度。通过调整推力指令,可以模拟不同的飞行场景,并观察航空器对推力变化的响应。
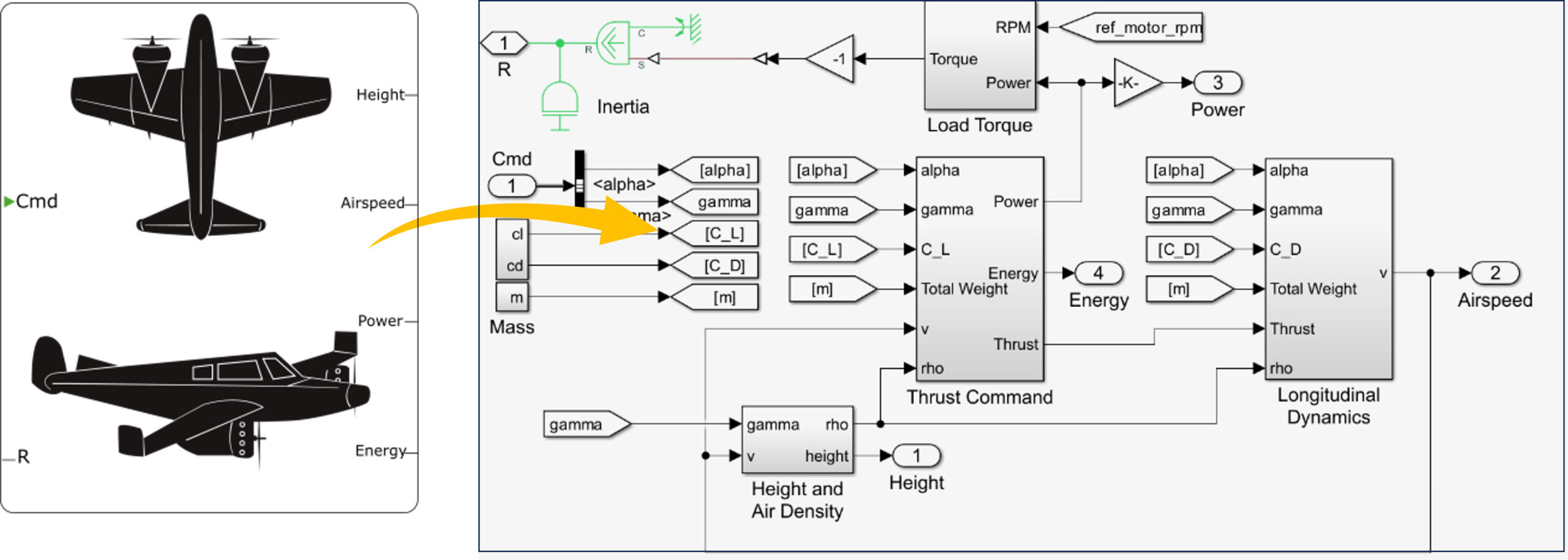
图 4. 电动航空器动力学模型
纵向动力学模块用于模拟航空器沿前向轴的运动,包括俯仰(上下运动)和升力特性。该模块对于分析航空器在各种飞行条件下的表现至关重要,例如起飞、着陆和巡航。
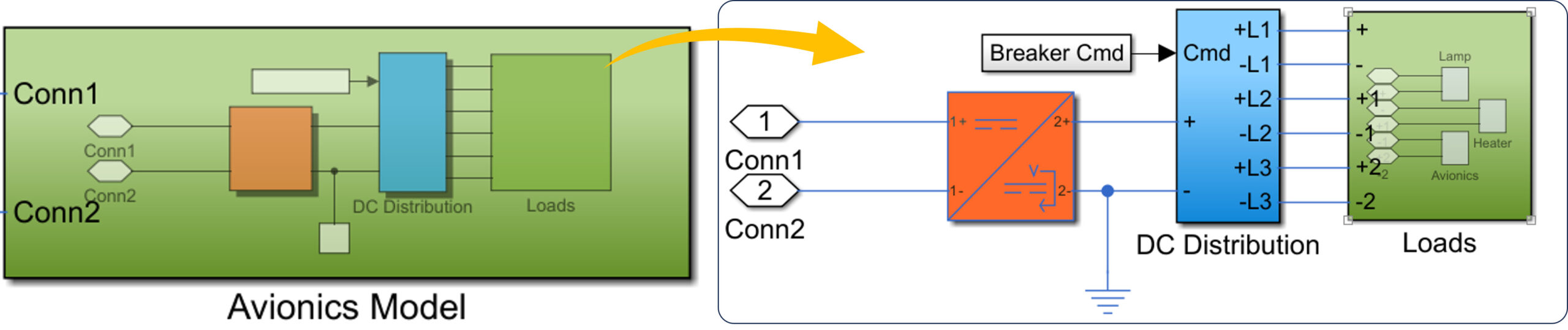
图 5. 电动航空器航空电子系统模型
最后,航空电子系统模型负责管理电动航空器内的电力分配和小型直流负载。该模型包括一个降压电源转换器,将电池电压降至适合通过直流配电系统为灯具、加热器等各类负载供电的水平。这确保了机上所有电气系统的高效可靠运行。
现在电动航空器系统模型已经使用 Simulink 构建完成,让我们来介绍 Impedyme 的 CHP 技术,以便对已开发的模型进行实时仿真与测试。
Impedyme 的 CHP 技术

图 6. Impedyme 的 CHP 机柜
Impedyme 的 CHP 平台特别适用于电动航空器的验证。从高频推进驱动到电池系统集成,CHP 使航空工程师能够在全负荷飞行条件下实时测试复杂系统。 From battery management systems to electric aircrafts, CHP empowers manufacturers to optimize performance, enhance reliability, and accelerate time-to-market for their designs. Its modular design ensures flexibility to adapt to evolving testing needs, while its intuitive Simulink interface streamlines the testing.
Impedyme CHP 的部分功能特点包括:

Impedyme 的仿真解决方案可以模拟您的 MATLAB Simulink 模型,用于高功率测试,功率可达数兆瓦,带宽可达 20 kHz。只需将光纤连接到我们的机柜,并部署您的模型,即可开始测试。每个机柜配备多个光纤链路,每条链路速率可达 12.5 吉比特每秒。对于超低步长的仿真,该设备支持基于 FPGA 的测试,使时间步长可低至几纳秒。此外,FPGA 的处理速度远高于 CPU,可为您的实时仿真提供更高性能。
此外,对于高速仿真,机柜中各抽屉的 FPGA 可以相互通信。使用 Impedyme 的 CHP 进行测试非常简便,因为它直接支持 Simulink 设计。我们的产品配备了丰富的预设计模型,您可以根据自身需求和要求自定义这些设计。此外,如果我们同时对电力系统的输入端和输出端进行仿真,就可以实现功率循环流动。由于功率被循环利用,只需补充电网中的功率损耗即可。这样的技术能够显著降低实验室在测试大功率系统时的功率需求。 在模型实时仿真过程中,我们的集成热管理系统采用先进的液冷 + 风冷技术,无需额外制冷设备即可保证温控。因此,我们使用 Impedyme 的 CHP 对所开发的海洋动力系统模型进行实时仿真。
现在我们已经开发完成航空器模型,让我们来看如何进行连接以启动测试过程。
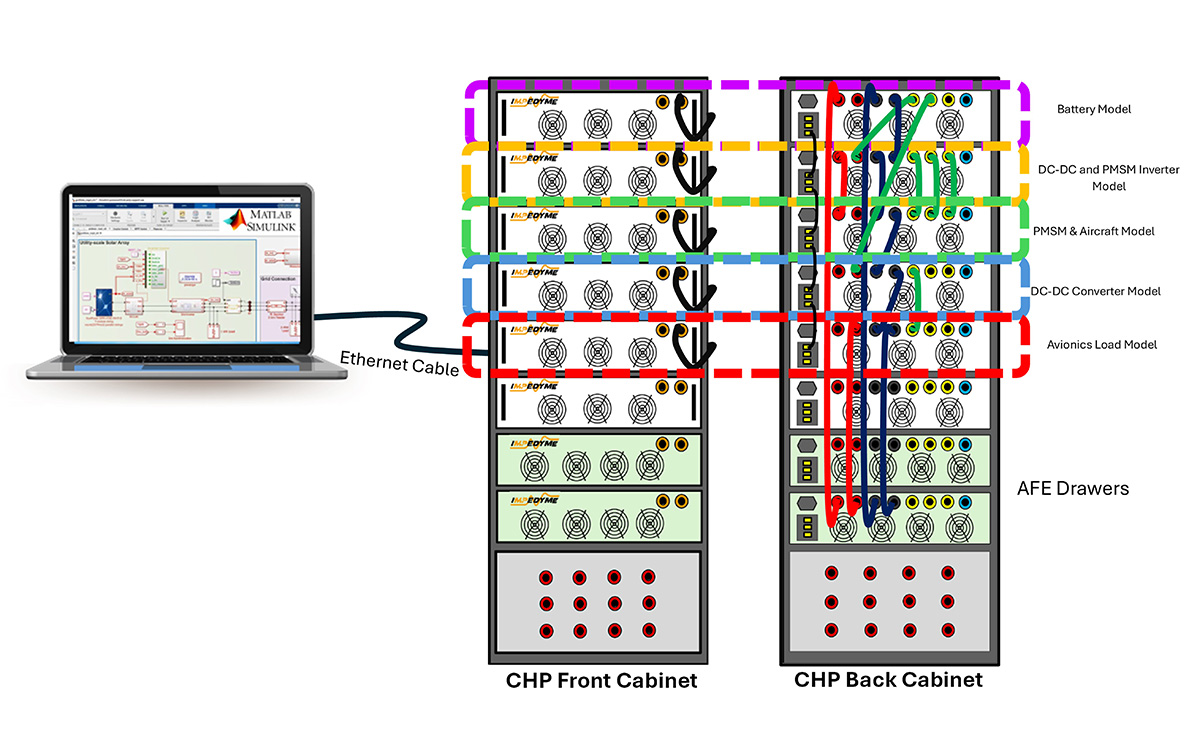
图 7. 电动航空器电力系统仿真:Impedyme CHP 连接示意图
我们将第一个抽屉(最上方的抽屉)分配给电池模型,第二个抽屉用于 PMSM 的 DC-DC 转换器和逆变器模型。同样,第三个抽屉专用于航空器的 PMSM 电机模型。最后,DC-DC 转换器和航空电子负载模型分别部署在接下来的两个抽屉中。最下方的两个抽屉则专用于提供直流耦合的有源前端转换器(Active Front End Converters),用于仿真系统。
现在,让我们来看如何进行这些抽屉的连接。电源连接位于机柜的背面。有源前端抽屉(Active Front End Drawer)提供的直流电源连接到电池模型抽屉,电池电压则供给 DC-DC/逆变器模型的输入电源。第二个抽屉模拟 DC-DC 和逆变器的作用,将电池的直流电转换为三相交流电,并依次供给下方的电机抽屉。最后,电池的直流电通过 DC-DC 转换器抽屉降压后供给下方的航空电子负载模型。航空电子负载模型将直流耦合反馈给有源前端抽屉,实现功率循环流动。连接完成后,我们即可开始测试。
This modular allocation not only mirrors the aircraft’s physical system architecture but also enables isolated fault injection and subsystem-level tuning. By closing the power loop through active front-end drawers, energy efficiency and thermal behavior can also be emulated with precision.
仿真结果
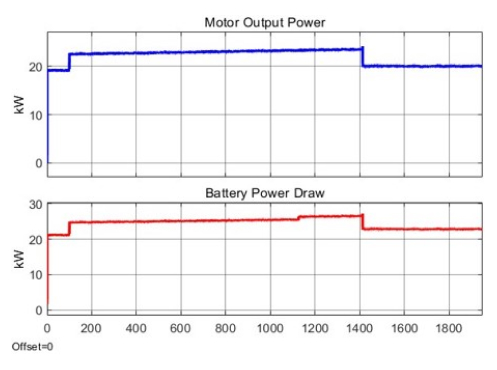
图 8. 仿真系统的电机与电池响应
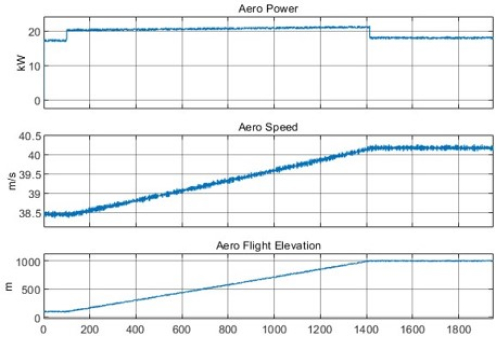
图 10. 航空器动力学
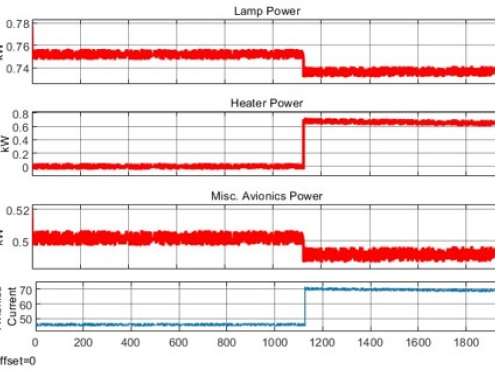
图 9. 航空电子负载的仿真响应
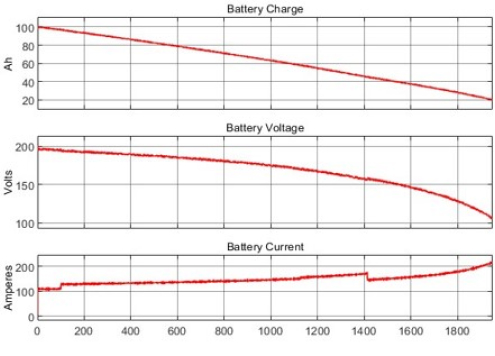
图 11. 电池动力学
参考文献
- Zhao Wang, Steve Miller (2018)。Simscape 中的电动航空器模型https://www.mathworks.com/matlabcentral/fileexchange/64991), MATLAB Central 文件交换。检索日期:2018 年 11 月 14 日。
- 225-238, March 2022, doi: 10.1109/TTE.2021.3119231.