


April 9, 2025

Application knowledgeProduct knowledge
-
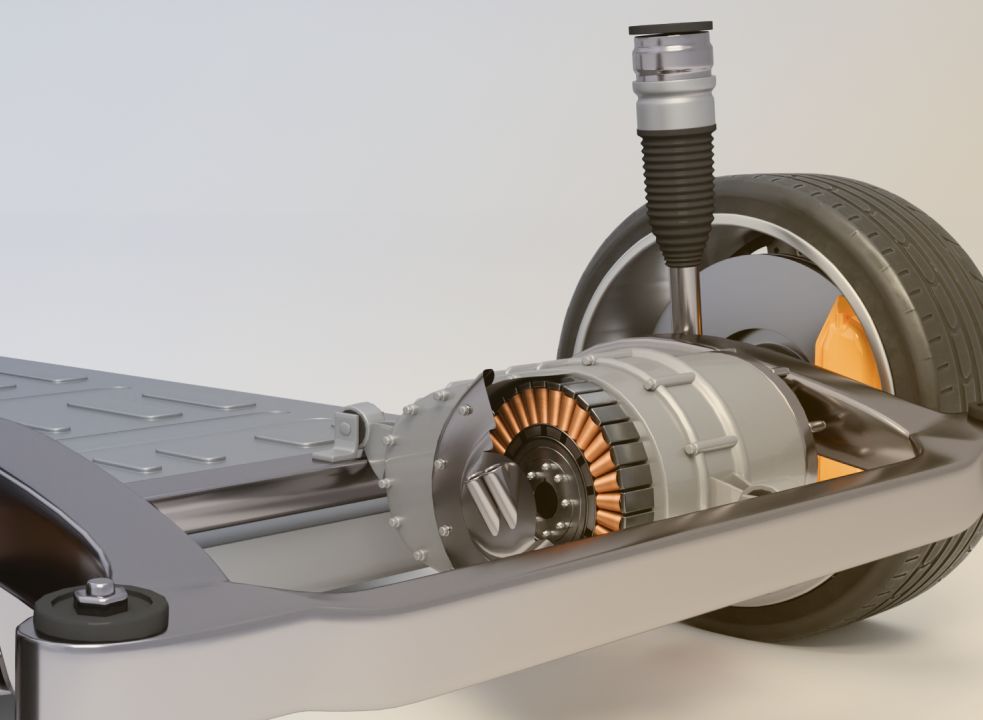
 Induction Motor
Induction Motor
-
Automotive Electrical System Simulation
-
DC/DC Bidirectional Converter
-
PWM Control for Brushless DC
-
BLDC Motor Control and Drive Simulation
-
Electric Vehicle Fast Charger Simulation
-
DFIG Wind Turbine Simulation
-
Dual Active Bridge
-
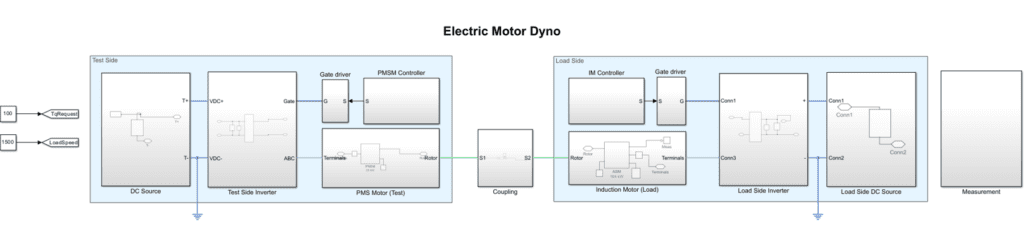
EV Dynamometer Test Environment Simulation
-
Electric Vehicle Simulation
-
Three-Phase Grid-Connected Inverter Using Direct-Q…
-
Three-Phase Grid-Connected Solar Photovoltaic
-
Grid-Connected Rectifier
-
Grid-Tied Inverter System
-
Torque Control in a Hybrid Excitation Synchronous …
-
Wye-Delta Starting Circuit
-
IPMSM-Based Axle-Drive
-
Simplified Parallel Hybrid Electric Vehicle
-
Simplified Series Hybrid Electric Vehicle
-
Series-Parallel Hybrid Electric Vehicle
-
Three-Phase Matrix Converter Simulation
-
Venturini Modulation for Three-Phase Matrix Conver…
-
Microgrid Frequency Regulation Using Vehicle-to-Gr…
-
Three-Phase Modular Multilevel Converter
-
Field-Oriented Control
-
Interior Permanent Magnet Synchronous Generator
-
Permanent Magnet Synchronous Machine
-
PMSM Rotor Angular Velocity
-
PMSM-Based Electrical Traction Drive
-
Maximum Power Point Tracking
-
Six-Phase Permanent Magnet Synchronous Machine
-
Synchronous Machine-Based Electrical Drive Simulat…
-
Single-Stage Solar Inverter
-
Three-Phase Cycloconverter Simulation
-
Totem-Pole PFC Simulation
-
Twelve-Pulse Thyristor Rectifier
-
Two-Wheeler On-Board Charger
-
Vienna Rectifier Simulation
-
High-Voltage Direct Current
-
Wireless Power Transfer





{kind=link}
{kind=link}
{kind=link}
{kind=link}